






星标“医工学人”,第一时间获取医工交叉领域新闻动态~
腰椎退行性疾病常由病理组织压迫椎管内神经引起,患者通常需要接受腰椎神经减压手术以缓解疼痛。与传统后路减压相比,前路减压在减少出血和缩短术后住院时间方面具有一定优势,但现有器械仍存在明显限制。由于前路手术需要经狭窄椎间隙到达脊柱后方区域,传统直杆器械常受限于视野遮挡和远端灵巧性不足,难以充分切除压迫神经的退变组织,从而可能导致减压不完全。
针对这一问题,四川大学华西医院团队提出了一种用于前路腰椎神经减压的微创机器人脊柱手术系统 MicroSpine,相关研究发表在《Science Robotics》。该系统以创新的柔性器械臂为核心,彻底打破了传统刚性器械的物理限制,使器械能够进入狭窄、受限和弯曲的解剖空间,在前路入路下到达脊柱后方区域,并辅助完成可视化、组织牵拉、切除和止血等操作。这一系统的诞生,标志着手术机器人正式跨入“极小尺寸与超柔性灵巧操控”的新战场。
图1:用于微创前路腰椎神经减压的机器人系统。(A) 床旁机器人。机器人化器械和驱动单元安装在刚性机械臂上。(B) 外科医生控制台。外科医生通过两个操纵杆控制器械,并在屏幕上查看内窥镜视野。(C) 器械和导向套管针的驱动单元,支持器械组件的快速释放与装配。(D) 器械和导向套管针的可转向节段,其中包含六个专用通道,用于器械通过和生理盐水循环。(E) 分离状态下的器械组件和驱动组件。(F) 双节段结构中的可转向节段。(G) 可转向节段中的榫卯式狭缝结构。(H) 具有“I”形狭缝的被动柔顺节段。(I) 基于 CPPR 的可转向节段示意图。每个节段由两根同轴中空钢管构成,便于集成第二节段或末端工具;这种双节段设计提高了器械灵巧性,并扩大了操作工作空间。
MicroSpine 由三支细长器械臂组成,单支器械臂外径约为 2 mm,系统总自由度为 18 个。三支器械臂通过细长套管集成进入手术通道,分别构成三类机器人化器械:用于可视化的内窥镜、用于止血和切除的激光光纤,以及用于组织操作的夹持器。多器械协同后,系统能够在较小空间内同时完成观察、牵拉和组织处理。
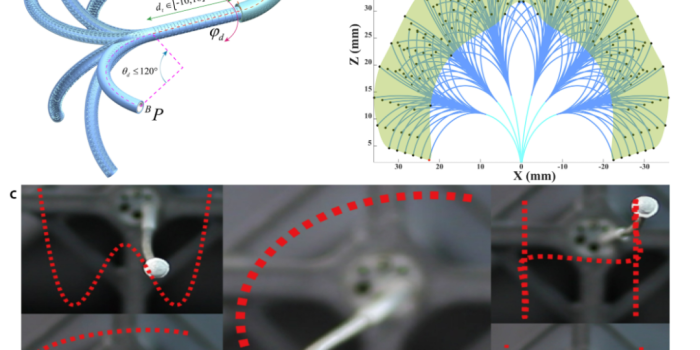
每支器械臂均基于同轴推拉机器人结构,即 concentric push-pull robot,CPPR。该结构使器械末端能够在狭窄椎间盘空间中产生弯曲,从而绕过传统直杆器械难以处理的解剖遮挡。根据文章介绍,器械臂具有双段式弯曲能力,远端弯曲角度可达 120°,使其能够导航至脊柱后方区域。
图 2:机器人基础性能测试,包括工作空间覆盖范围和给定路径跟踪能力。(A) 参数化的机器人臂形态。远端节段穿过近端节段的中空腔体,从而实现大弯曲角度下的高灵巧性。(B) 关闭近端节段平移自由度时,末端执行器工作空间的横截面。(C) 开环二维路径跟踪。
柔性器械进入脊柱场景后,还需要解决操作力不足的问题。文章中提出的榫卯狭缝结构用于增强柔性臂刚度。该结构在弯曲过程中形成互锁,从而在保持弯曲能力的同时提升支撑性能。文中数据显示,机器人可提供最高约 4.4 N 的操作力,使其不仅能够进行组织牵拉,也能够搭载铥激光完成骨赘或增生组织的处理。
首先,研究团队进行了机器人运动性能测试,器械臂沿一系列二维路径运动,用于评估系统的路径跟踪能力。结果显示,在开环控制下,存在急转弯的路径跟踪误差为1.65 mm,RMSE 约为 0.9 mm,当路径更平滑时,误差还可进一步降低。该结果说明,在微型化和柔性化设计下,系统仍可保持较高的运动控制精度。
随后,研究团队基于患者 CT 数据重建 L3—L5 腰椎,并制作 3D 打印人体椎骨模型进行体外验证。实验在未使用 OLIF 牵开器、椎间距约 6 mm 的狭窄条件下开展,重点评估内窥镜、激光臂和抓取臂在椎间隙内的可视性、可达性和协同操作能力。系统共测试六个关键区域,包括左右侧上、下关节突,以及 L4、L5 椎体后正中线。结果显示,三种器械臂均能在内窥镜引导下到达目标区域;20 次重复试验中,左侧后方区域成功率为 100%,右侧后方区域为 95%。其中抓取臂近端和远端节段分别弯曲约 50° 和 70°,说明该系统在狭窄复杂椎间空间内具有较好的灵巧性和协同操作能力。
图 3:3D 打印人体椎骨模型中的体外实验。(A) 实验装置及侧视图,显示椎体与机器人套管针之间的位置关系。(B) 三个机器人器械同时部署至左侧关节突区域,用于模拟骨赘切除。(C) 左侧上关节突和下关节突的内窥镜视野。(D) 系统接近右侧后方区域时的精确器械控制。(E) 器械到达右侧上关节突时的侧视图和局部放大图。(F) 操作右侧上关节突和下关节突时的内窥镜视野。
研究团队进一步在猪脊柱中验证系统的体内操作能力,重点考察铥激光切除、止血以及多臂协同效果。实验按照标准 OLIF 流程建立侧方入路,在内窥镜引导下将机器人器械送入椎间盘间隙。结果显示,铥激光能够完成纤维环、髓核及关节突等组织切除,并可通过调整参数实现术中止血;短暂出血被迅速控制,总失血量较低约为 5 mL,并且没有对邻近的神经或纤维组织造成热损伤。抓取臂在过程中辅助牵拉和清理组织,提高了激光操作效率。由于猪椎间盘空间较人类更狭窄,该实验主要验证了系统在体内环境下的组织处理能力、止血能力和多器械协同能力。
图 4:机器人系统在猪脊柱体内结构中的评估,重点考察手术工具功能以及对一系列目标区域的可及性。(A) 麻醉后的猪处于侧卧位;刚性机械臂将套管针对准标准 OLIF 牵开器。(B) 开始切开纤维环。(C) 通过灌注和吸引处理术中出血,以恢复手术视野清晰度。(D) 切除髓核,以建立进入脊柱后方区域的通道。(E) 使用两个机器人器械进行组织协同操作。(F) 激光辅助切除右侧后方上关节突。
为进一步评估系统在人体解剖结构中的可行性,研究团队开展了人体尸体标本实验。实验按照标准 OLIF 入路进行,通过3cm小切口暴露椎间盘,并结合 CBCT 和透视确认手术目标。三根机器人器械进入椎间隙后,先切除椎间盘并建立通往后方区域的通道,随后在内窥镜和影像定位辅助下进入后方椎管,完成双侧关节突区域的切除。整个减压流程约 15 分钟完成,说明 MicroSpine 能够在人体解剖结构中到达迂曲的后方区域,并完成椎间盘和后方骨性结构处理。与传统手术约 1—1.5 小时的操作时间相比,该结果提示该系统在特定实验场景下具有较高操作效率。需要注意的是,该标本未诊断为退行性脊柱疾病,且保存时间较长,因此该实验主要用于验证解剖可行性和操作流程,而不能直接代表真实临床疗效。
图 5:MicroSpine 系统的人体尸体实验评估。(A) 人体尸体标本处于侧卧位,机器人套管针对准手术通道。(B) 外科医生在椎间盘上切开一个小入口,用于标记器械进入通道。(C) 机器人器械进入椎间盘间隙时的内窥镜视野。(D) 可转向摄像臂通过椎间盘上的小通道,获取后方区域视野。(E) 右侧后方区域减压。(i) 切除右侧上、下关节突周围的弹性组织。(ii) 激光束正在切除坚硬的脊柱组织。(iii 和 iv) 器械位于右侧时的侧位和正位透视图像。(F) 左侧减压。(i 和 ii) 激光臂切除上关节突和下关节突时的内窥镜视野。(iii 和 iv) 机器人器械位于左侧时的侧位和正位透视图像。
总体来看,本研究围绕标准 OLIF 手术难以直接处理后方神经压迫区域的问题,设计了 MicroSpine 柔性脊柱微创手术机器人系统。该系统利用 OLIF 手术的自然解剖通道和微创优势,将纤细灵巧的机器人器械、CPPR 结构、多臂协同操作和铥激光切除技术结合起来,使器械能够进入狭窄椎间隙,并进一步到达后方目标区域,实现椎间盘、关节突等组织的切除。通过 3D 打印人体椎体模型、体内动物实验和人体尸体实验,研究初步验证了该系统在可视化、可达性、组织切除、止血和完整减压流程方面的可行性。
本研究的创新点主要体现在以下几个方面。第一,MicroSpine 将传统 OLIF 手术由以间接减压为主,拓展为前路路径下的直接减压策略,使器械能够处理标准 OLIF 难以触及的后方病变区域。第二,系统采用外径约 2 mm 的纤细器械臂和 8 mm 微型套管针,适合在狭窄椎间空间内操作。第三,CPPR 结构结合榫卯狭缝设计,在保持柔性弯曲能力的同时提高了器械刚度,使其能够兼顾神经周围精细操作和骨性组织处理。第四,系统集成内窥镜、抓取臂和铥激光光纤,实现了可视化、牵拉、切除和止血的多臂协同。第五,研究通过模型实验、动物实验和人体尸体实验进行逐级验证,较系统地评估了该机器人在复杂脊柱解剖空间中的应用潜力。
同时,该系统仍存在一定局限性。首先,当前运动学模型基于分段恒定曲率假设,当器械受到外部组织阻力或扰动时,实际运动可能与模型预测存在偏差。由于器械臂尺寸较小,系统尚未集成内部传感器,控制方式仍以开环控制为主,外科医生缺乏直接触觉反馈。其次,现有人机交互方式仍不够直观,可能影响操作效率。第三,受限于器械直径,内窥镜摄像头的分辨率和焦距仍有限,可能影响深部狭窄空间内的图像质量。
未来研究可围绕操作界面、传感反馈和三维重建进一步优化。总体而言,MicroSpine 为前路腰椎神经减压提供了一种新的机器人辅助思路,也为未来微创脊柱外科的发展开辟了值得关注的方向。
李康教授,四川大学华西医院生物医学大数据研究院研究员,博士生导师,四川大学匹兹堡学院科研副院长,中国生物医学工程学会科普工作委员会副主任委员。主要从事医学人工智能、医疗机器人、生物力学、人机交互等领域的研究。牵头成立华西医院-商汤科技联合实验室和“岷山计划”华西医疗机器人研究院,旨在促进机器人、人工智能和医疗领域的科技创新和技术升级。曾担任美国知名大学医学院副教授,计算机系和生物医学工程系博士生导师,主持/联合主持国内外项目30余项,在国际重要刊物和国际权威会议上发表论文300余篇。
END
撰文 | 程虞茜、姜泽坤
排版 | 周宇茜
审核 | 医工学人理事会
扫码加入医工学人,进入综合及细分领域群聊,
参与线上线下交流活动
