






星标“医工学人”,第一时间获取医工交叉领域新闻动态~
基因疗法可以挽救脊髓性肌萎缩症(SMA)患儿的神经元,却无法让已经萎缩的肌肉“重生”。如今,一款仅重0.96公斤的可穿戴等速训练机器人给出了答案:经过6周训练,6名SMA患儿的股四头肌体积增加19%,屈膝峰值扭矩提升130%,且效果在停止训练后仍可维持。这项来自北航、MIT媒体实验室与北大三院的研究,为神经肌肉疾病康复开辟了一条“机器人主动训练”的新路径。
脊髓性肌萎缩症(SMA)是一种由SMN1基因突变导致的罕见遗传病,发病率约为万分之一。患者脊髓前角运动神经元持续死亡,导致其所支配的肌肉——尤其是下肢近端肌群——逐渐萎缩、无力。
过去十年,基因替代疗法(如Zolgensma)和基因修饰疗法(如Spinraza、Evrysdi)彻底改变了SMA的预后。这些药物能够有效阻止或大幅延缓运动神经元的丢失,将曾经预期寿命不足30岁的I型患儿带向长期生存。
然而,一个被药企和临床医生反复回避的问题依然存在:基因疗法只能“止损”,却无法“修复”。对于已经形成的肌肉萎缩、关节挛缩和功能丧失,药物无能为力。
传统物理康复(如被动拉伸、低强度抗阻训练)虽然安全,但对于SMA患儿而言存在两个根本缺陷:
-
强度不足:常规训练难以提供足够的代谢刺激,无法触发肌肉肥大所需的生理信号通路;
-
依从性差:重复、枯燥的动作训练,对6-10岁的儿童缺乏吸引力,家庭场景下更难坚持。
因此,如何在基因疗法提供的“神经元保护窗口期”内,重建已经丢失的肌肉质量与功能,成为SMA综合治疗中亟待解决的核心难题。
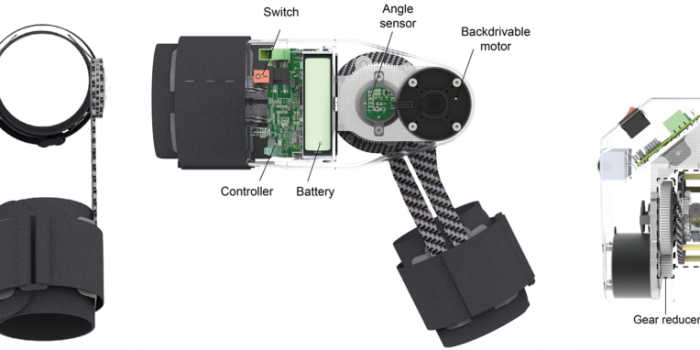
这项研究的核心创新,并非某一项“从天而降”的颠覆性技术,而是将等速训练原理、轻量化机械设计和儿童友好的交互体验,整合为一套可穿戴、可居家使用的闭环系统。
图1:机器人的正视图、侧视图、俯视图(从左到右)。
传统抗阻训练(如举哑铃)中,阻力恒定,但关节角速度随肌肉力臂变化而波动——这容易在肌力最薄弱的关节角度处造成“粘滞点”,增加损伤风险。
等速训练(Isokinetic Training) 则不同:它通过实时调节阻力,迫使肢体在整个运动范围内以恒定角速度运动。这意味着,肌肉在每一度关节角度上都承受着与其当前最大出力相匹配的负载,从而实现全程最大收缩——这是诱发神经肌肉适应的最有效刺激之一。
图2:闭环等速控制。
过去,等速训练设备是大型、笨重、昂贵的实验室或康复中心专用仪器(如Cybex、Biodex系统),根本无法应用于儿童或家庭场景。
1、可变刚度机构
(Variable Stiffness Mechanism):
允许机器人在非训练状态下处于“低刚度”模式,不对儿童关节施加刚性约束;一旦检测到主动伸膝动作,即刻切换至等速阻尼模式。这确保了被动安全性——即使机器人意外失控,也不会对脆弱关节造成剪切损伤。
2、可反向驱动阻尼电机
(Back-drivable Damping Motor):
传统电机在断电后难以被外力驱动(呈“抱死”状态),而该电机在待机时可以被轻松拉动,仅在需要提供等速阻力时才主动产生反向力矩。这对于儿童主动参与的意愿至关重要——他们不会感到被一台“冰冷的机器”强制推拉。
“便携特性使该设备非常适合家庭环境。”
——冯仰刚,北京航空航天大学,通讯作者
这是一项单臂、前瞻性临床试验(NCT06648486),纳入6名II型SMA患儿,年龄6-10岁,均无法独立行走,且正在接受基因治疗。入组前,这些儿童已接受常规物理康复,但无明显功能性获益。
图 3:股神经传导评估。
干预方案:6周内完成30次机器人辅助训练,每次训练包含≥60次膝屈伸动作(单侧或双侧)。训练采用等速模式,角速度固定,阻力随患儿主动发力程度实时调整。为了提升参与度,研究团队将系统游戏化——患儿在平板电脑上看到自己“踢球”的动画反馈。
“生物力学指标的戏剧性增长和神经肌肉系统的协同变化绝对让我们震惊。”——冯仰刚
更具临床意义的是,这些数据转化为了真实世界的能力提升。
MIT媒体实验室的Tony Shu(共同作者)引用家长反馈称:“在家里,当孩子试图从床上翻身或以某些方式调整身体时,家长注意到,因为这套训练方案,这件事变得容易多了。”
此外,在为期数周的洗脱期(停止机器人训练,回归常规康复)后,患儿的功能增益并未显著消退。这表明,等速训练可能触发了某种持久的神经肌肉可塑性,而非短暂的“训练后急性效应”。
如果说基因疗法为SMA患者“保住了火种”,那么这项技术则为“重新点燃火焰”提供了可能。
宾夕法尼亚大学匹兹堡分校生物工程师Elvira Pirondini评价道:“这是一项非常重要的工作,为临床提供了关键信息。” 但她同时审慎地指出,目前尚不确定机器人是否具有独特优势,还是说其他高强度训练形式也能达到类似效果。
凯斯西储大学生物工程师Sandra Hnat指出,该机器人所使用的技术本身并非革命性突破,但其贡献在于:推动了可穿戴机器人从“辅助运动”向“主动训练并强化身体”的范式转变,并且将这一技术应用到了此前被忽视的青少年患者群体中。
商业化路径上,团队面临两个现实挑战:
1、对照试验的缺失:
由于家庭不愿冒“被分到对照组”的风险(即无法保证获得机器人干预),且研究经费有限,本研究未能设置随机对照。
2、产业转化需求:
团队希望找到投资者支持后续开发,将该系统适配到其他关节和肌肉群的训练。
通讯作者冯仰刚认为,该设备不仅是SMA基因治疗的补充手段,其应用还可扩展至:
-
其他神经肌肉疾病:如杜氏肌营养不良(DMD)、腓骨肌萎缩症(CMT);
-
老年肌少症:作为居家力量训练方案;
-
骨科术后康复:如前交叉韧带重建后的等速肌力恢复。
尽管这项研究令人振奋,但未来的探索还需要解决几点问题:
1、缺乏主动对照组
如果没有设置“高强度常规康复”或“无训练安慰剂”对照组,就无法排除自然史波动或安慰剂效应。虽然SMA的自然史通常为进行性恶化,但在基因治疗背景下,肌肉功能的长期轨迹尚不明确。
2、样本量极小(n=6)
这是探索性研究的典型规模,但个体差异(如基因型、基因治疗起始年龄、残余运动功能)可能对结果产生混杂影响。更大规模的验证性研究是必要的。
3、训练频率与剂量的最优方案未知
目前采用的是“6周30次,每次≥60次重复”。更少或更多的剂量是否同样有效?每周应训练几次?这些参数尚未优化。
4、长期安全性数据缺失
虽然短期(6周)未报告不良事件,但长期佩戴可穿戴机器人对儿童骨骼发育、关节软骨及韧带的影响,需要更长时间的随访。
5、普适性存疑
所有受试者均为正在接受基因治疗的II型SMA患儿(均不能行走)。对于更严重的I型(婴儿型) 或更轻症的III型(青少年型),以及未接受基因治疗的患者,该设备是否同样有效?尚无数据。
“这是一项重要的概念验证,但距离写入临床指南还有很长的路要走。”——匿名神经康复专家(非该研究团队成员)
Li, Y., Ren, J., Shu, T. et al. Spinal neuromotor rehabilitation using a portable isokinetic training robot. Nature (2026). https://doi.org/10.1038/s41586-026-10642-0
END
撰文 | 郝娅婷
排版 | 王可豪
审核 | 医工学人理事会
扫码加入医工学人,进入综合及细分领域群聊,
参与线上线下交流活动
