






星标“医工学人”,第一时间获取医工交叉领域新闻动态~
微米级医疗机器人长期受困于“无记忆”短板,必须依赖持续的外部操控。同济大学、上海创新研究院研究团队将基因记忆电路整合进磁性益生菌机器人,通过一次磁热触发即可自主持续治疗至少12天,将抗肿瘤疗效从21.86%提升至87.52%,并为自主式医用微型机器人建立了通用设计框架。
医疗微型机器人的愿景很清晰:它们可以穿梭于人体难以触及的角落,完成靶向药物输送和微创手术。过去十年,科学家们已经实现了用磁场、光、超声等方式对这些“小不点”进行无线操控。
但一个根本性的瓶颈始终存在:它们没有“记忆”。
这意味着,一旦外部控制信号撤去,微型机器人就会立刻“失忆”,停止执行任务。对于需要持续数周甚至数月治疗的实体瘤患者而言,这意味著他们无法摆脱对频繁临床治疗的依赖。正如论文作者在引言中指出的:“目前的微型机器人缺乏机载存储,一旦外部刺激被撤回,它们就无法执行任务。”
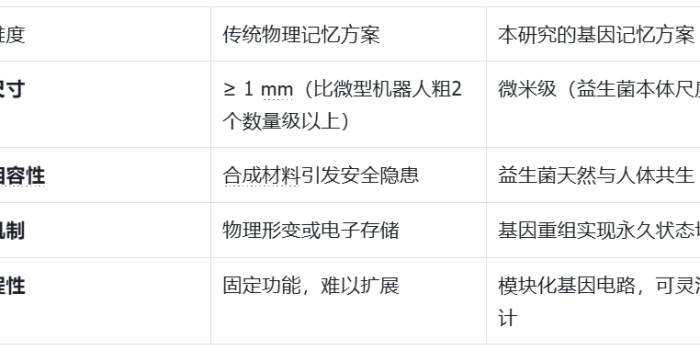
解决这个问题的常规思路是使用形状记忆材料或微电子元件。但这些方案存在两个致命缺陷:
更关键的是,即便解决了尺寸和生物相容性问题,物理记忆方案也难以实现“感知-记忆-执行”的闭环自主操作。肿瘤治疗需要的不是一次性的物理变化,而是基于环境感知的、可持续的治疗状态维持。
正是在这个交叉点上,研究团队提出了一个大胆的假设:能否将基因记忆电路“写入”微型机器人,让它们像生命体一样“记住”曾经受到的刺激,并据此自主执行长期治疗?
这项研究的核心突破在于将合成生物学与磁性纳米材料深度融合,构建了一个五模块集成的基因回路。
图1:具有基因记忆的益生菌微型机器人集群放大抗肿瘤效能的原理示意图。
记忆电路的工作原理
整个系统的核心是一个被编码进益生菌大肠杆菌Nissle 1917(EcN)的基因回路。这个回路包含五个功能模块:
1. 热传感器(Tc1):一个温度敏感的λ噬菌体抑制子。在正常体温(37°C)下,它处于“关闭”状态,抑制下游基因表达。
2. 致动器(pR-pL):热诱导启动子。当温度超过42°C时,传感器的抑制被解除,启动子开始工作。
3. 记忆模块(Bxb1-ssrA-attB-P7-attP):这是整个设计的点睛之笔。Bxb1是一种重组酶,它催化attB和attP位点之间的重组,导致P7片段发生永久性翻转。一旦翻转发生,即使温度回落,回路也会“记住”这个状态,持续激活下游基因。ssrA降解标签则确保Bxb1被及时降解,避免对益生菌造成过度代谢负担。
4. 治疗模块(aprN基因):编码纳豆激酶(NK),一种能够降解纤维蛋白的酶,用于软化肿瘤微环境。
5. 成像反馈模块(mCherry):表达红色荧光蛋白,用于实时追踪。
一个精妙的类比:可以把这套系统想象成一个智能恒温器。热传感器是温度计,致动器是开关,记忆模块则像一个“自锁电路”——一旦房间温度超过设定值,开关就会锁定在“开”状态,即使温度回落,空调仍会继续运行。在这个案例中,“空调”就是纳豆激酶的持续合成。
磁性操控的双重角色
研究团队在益生菌表面共价偶联了棒状四氧化三铁纳米颗粒(MNP,约230 nm,长径比3.15)。这些MNP扮演着双重角色:
· 磁热转换器:在交变磁场(375 kHz, 330 Oe)下,MNP在20分钟内使温度升高18.3°C,触发基因回路。
· 磁驱动机器:在旋转磁场或摆动磁场下,机器人可以形成集群并通过“波动模式”实现高效运动。
性能数据的直观对比
“机载交互指标 Ni/Lc = 5.33”——论文用这个公式衡量微型机器人的功能集成度(Ni为集成的机载功能数量,Lc为特征长度)。相比之下,传统机械和混合微型机器人的这一指标远低于本研究。
体外实验:从“翻滚”到“波动”的跨越
团队发现,传统的“翻滚模式”运动效率极低,仅能达到理论纯滚动速度的约30%,主要原因是在流体环境中存在严重的滑移。他们创新性地引入了三维波动模式——通过叠加一个垂直于运动平面的振荡磁场,增大了与接触面的有效接触面积。
数据对比:
· 翻滚模式:每个运动周期前进约0.27个体长
· 波动模式:每个运动周期前进约0.63个体长,速度提升超过2倍
在模拟肿瘤微环境的胶原蛋白凝胶中,波动模式的穿透深度达到了1820.51 μm,而翻滚模式仅为327.48 μm,提升了5.55倍。
体内实验:软化-穿透的正反馈循环
在三阴性乳腺癌(4T1)小鼠模型中,研究团队展示了一个巧妙的“正反馈循环”机制:
1. 记忆驱动的持续软化:一次性磁热触发后,微型机器人持续释放纳豆激酶,使肿瘤基质的压缩模量从5.26 kPa降低至2.06 kPa。
2. 磁控波动的深层穿透:软化后的肿瘤组织更容易被波动模式驱动的机器人穿透。
3. 自我强化:更深层的穿透意味着更多的机器人进入肿瘤内部,进一步释放纳豆激酶,形成“软化-穿透-再软化-再穿透”的循环。
免疫学后果:肿瘤微环境的软化显著促进了CD8+细胞毒性T细胞的浸润。在Swarm^NK/Memory + WMF组中,CD8+ T细胞占CD3+ T细胞的比例达到39.82%,而对照组仅为15.48%。
安全性评估
生物安全性是任何体内应用的前提。研究团队进行了系统评估:
· 体重与血生化:所有治疗组小鼠体重稳定,肝功能(ALT、AST、ALP)和肾功能(CREA、UREA)指标均保持在正常范围。
· 益生菌清除:益生菌在心脏、肝脏、脾脏、肺、肾脏等主要器官中被逐渐清除,而在肿瘤中呈现指数级增长(优先定植效应)。
· 磁性纳米颗粒:主要滞留在肿瘤内,少量在脾脏中积累(脾脏是纳米颗粒的主要清除器官),21天后未见明显全身毒性。
行业意义:一个通用框架的诞生
论文最值得关注的价值主张并非仅限于“抗癌疗效数据”,而是其声称的“通用框架”。Bxb1-ssrA-attB-P7-attP记忆模块可以替换不同的传感器和治疗基因,理论上可以适配多种疾病场景:
商业化距离:还有多远?
1. 给药途径的挑战:本研究采用瘤内注射,这在临床转化中面临局限性。对于深部或不可触及的肿瘤,需要开发静脉注射、口服或内镜引导的递送策略。研究者在讨论部分坦诚列举了各种途径的利弊(见原文及补充表S5)。
2. 磁场穿透深度:磁场在生物组织中的衰减是物理定律。研究者的5自由度磁控系统在4.46 cm厚的猪组织中仍能维持有效扭矩——这与人类腹壁厚度相当,提示该系统在深部器官中具有潜力。但更深的组织(如大脑深部)仍需更强大的磁场或新的递送策略。
3. 水平基因转移的担忧:益生菌携带的合成基因回路是否可能通过水平基因转移进入人体细胞或肠道菌群?研究者的回应是:细菌基因需要克服细胞膜、核膜、核酸酶等多重屏障,且注射剂量仅占动物体内总细菌载量的约0.1%,风险可控。但这仍然是监管机构关注的重点。
如果成功,它将如何改变世界?
“患者需要长期治疗,可能需要数周甚至数月。在传统疗法下,频繁的临床就诊是不可避免的。开发能够自主持续治疗的微型机器人,为减少对持续医疗的依赖提供了有希望的途径。”
这是论文引言中的一句话,也是这项研究最深远的意义所在。它指向的不是一个“更好的抗癌药”,而是一种新的治疗范式——从“被动给药”转向“自主治疗”,从“频繁干预”转向“一次触发,长效执行”。
在肯定这项研究的突破性之余,有必要指出几个尚未解决的关键问题:
1. 记忆的“擦除”机制:目前设计的基因记忆是永久性的(通过DNA重组实现)。在临床场景中,是否需要一种机制来“重置”或“擦除”记忆?如果治疗完成或出现不良反应,能否主动关闭机器人的治疗功能?论文中没有涉及这一点。
2. 异质性肿瘤环境的适应性:实体瘤的微环境极其异质——有的区域缺氧,有的区域呈酸性,有的区域纤维化程度极高。机器人能否在所有区域均匀分布并发挥作用?尽管波动模式在胶原凝胶中表现出色,但真正的肿瘤基质远比实验室模型复杂。
3. 规模化生产的质量控制:如何确保每一批基因工程益生菌的记忆模块功能一致?在细菌传代过程中,质粒的丢失是一个已知风险(论文补充图S2显示120代内保持稳定,但商业化生产需要更严格的质控)。
4. 人类免疫原性:即使EcN被认为是“益生菌”,在人体内反复或长期使用仍可能诱发免疫反应。小鼠模型难以完全预测人类免疫系统的响应。
结语:这是一篇兼具创新深度和工程优雅性的研究。它巧妙地避开了“在微米尺度集成电子存储器”的技术死胡同,转而利用生命体自身的分子机器来实现感知、记忆和执行。在自主式医疗微型机器人的发展道路上,这无疑是一个里程碑式的进展。下一个需要回答的问题是:这项技术能否在一个活着的、复杂的人类患者体内复制其在老鼠身上的成功?
https://www.science.org/doi/10.1126/sciadv.aeb2528
END
撰文 | 郝娅婷
编辑 | 周宇茜
审核 | 医工学人理事会
扫码加入医工学人,进入综合及细分领域群聊,参与线上线下交流活动
