






星标“医工学人”,第一时间获取医工交叉领域新闻动态~

当你还在思考要做什么的时候,智能设备已经准备好为你行动。 人机交互的终极形态,是机器能像你的影子一样,提前预判你的每一个动作。2026年3月7日,一篇发表于《npj人工智能》的综述(题为“Recent advances in intelligent wearable systems: from multiscale biomechanical features towards human motion intent prediction”,智能可穿戴系统的最新进展:从多尺度生物力学特征到人体运动意图预测),华南理工大学研究人员系统性地梳理了实现这一愿景的核心路径:通过融合多尺度生物力学特征(身体加速度、关节角度、肌肉激活信号)与先进的人工智能算法,人体运动意图预测(HMIP)正走向高精度、多模态和实时化。这不仅是假肢、外骨骼的福音,更将重塑人机协作、运动训练和智能驾驶的未来。
想象一下,你正准备从步行突然转为奔跑,你的外骨骼机器人能比你的肌肉反应更快地调整支撑力;你刚想拿起一个水杯,智能假肢已经精准地张开了手指。这并非科幻电影,而是人体运动意图预测(HMIP)试图实现的人机交互新范式。
然而,直到今天,我们与大多数可穿戴设备的交互依然是“指令式”和“后知后觉”的。无论是智能手表监测你的步数,还是VR手柄捕捉你的挥手,它们处理的都是“已经发生”的动作。真正的挑战在于:机器如何能像我们自己的身体一样,理解“将要发生”的意图?
长期以来,实现精准的运动意图预测面临着一道看似不可逾越的鸿沟:生物信号的复杂性与机器理解的单一性之间的矛盾。
过去的研究往往陷入几个误区:一是特征选择的碎片化。有的研究专注于关节角度,有的则依赖肌电信号,但人体运动是一个从大脑皮层到肌肉纤维,再到关节、肢体的完整链条。任何单一层面的数据都如同“盲人摸象”,无法还原真实的运动意图全貌。
二是传感器与算法的“两层皮”。传统方法多采用单一的惯性传感器(IMU)或肌电传感器(EMG),数据维度有限。而在算法上,早期依赖线性判别分析(LDA)或支持向量机(SVM)等传统机器学习模型,在处理肌电信号这种高维度、非线性、时变的复杂信号时,显得力不从心,模型泛化能力差,换个人、换个场景,准确率就大幅下降。
三是实时性与精度的“零和博弈”。要实现流畅的人机交互,系统必须在毫秒级内做出响应(例如,假肢控制通常在100-200ms内)。而高精度的深度学习模型往往计算量巨大,难以在资源受限的可穿戴设备上部署。这就形成了一个困境:要快,就牺牲准度;要准,就牺牲流畅。
这篇综述的核心价值在于,它并非提出某个单一技术,而是首次系统性地构建了一个从数据源头到智能决策的完整框架。这个框架的底层逻辑,是回归人体的物理本质——生物力学。
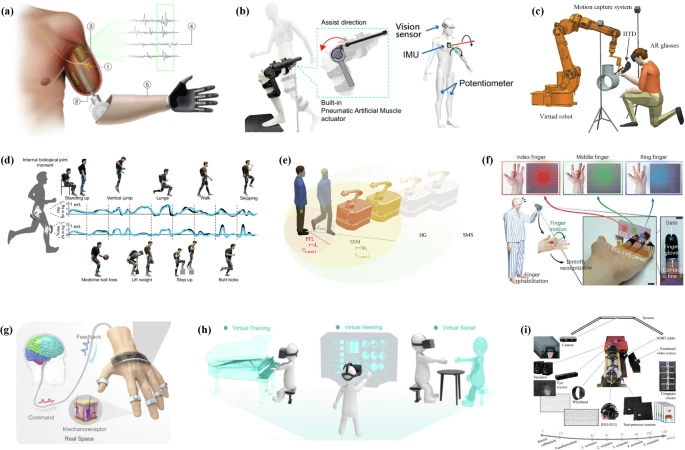
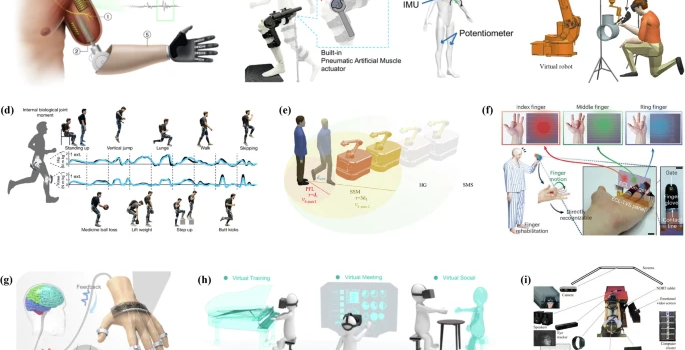
图 1 | 人体运动意图预测(HMIP)的应用场景
a 植入式肌肉传感器与HMIP算法改善了假肢控制,助力打造高性能仿生肢体,图片经许可改编自原文参考文献31。
b 多模态传感器能够实现更准确的意图预测,增强下肢外骨骼的交互式控制,图片经许可改编自原文参考文献35。
c 机器人通过HMIP系统在近距离操作中辅助人类,图片经许可改编自原文参考文献39。
d 通过关节角度预测人体运动意图,以警示不良姿势,图片经许可改编自原文参考文献46。
e 辅助机器人通过预判人类动作,快速响应任务需求,图片经许可改编自原文参考文献40。
f 用于手指康复监测的可穿戴式电化学发光-热致变色器件(ECL-TVS),图片经许可改编原文自参考文献49。
g 将HMIP技术与触觉传感器相结合,实现沉浸式交互的快速感知,图片经许可改编自原文参考文献51。
h 基于触觉传感器的HMIP交互增强了沉浸式虚拟现实(VR)体验,图片经许可改编自原文参考文献51。
i 基于HMIP的驾驶员行为预测,用于与车辆系统的交互式规划,图片经许可改编自原文参考文献54。
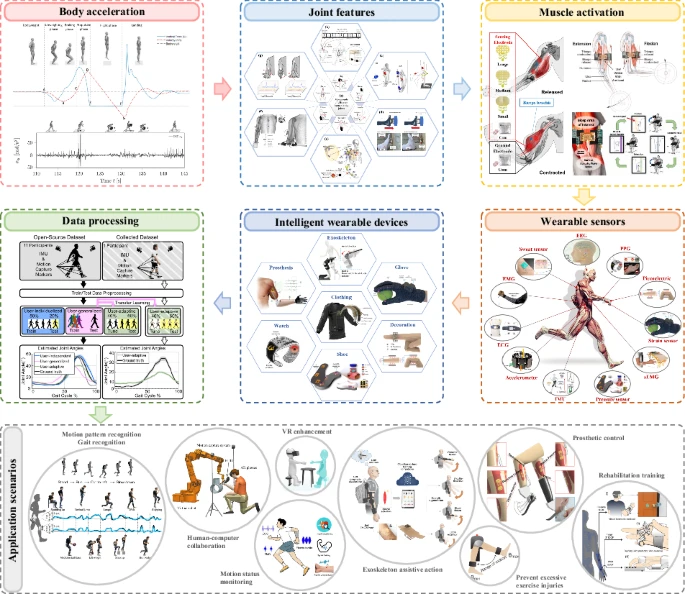
研究者们提出了一套基于多尺度生物力学特征的HMIP系统架构,将人体运动的“密码”分解为三个层级:
|
层级 |
核心特征 |
传感器 |
解读 |
创新价值 |
|
宏观系统级 |
身体加速度 |
惯性测量单元(IMU),通常佩戴于腰部或躯干 |
反映整体的运动状态和稳定性,如步态、跌倒倾向。例如,在突然停止或转身前约200毫秒,躯干加速度会产生特征性突变。 |
提供“大背景”和“突变信号”,用于意图切换的早期预警。 |
|
中观局部级 |
关节角度、角速度、力矩 |
柔性应变传感器、IMU、压力鞋垫 |
量化肢体运动的精确轨迹。例如,膝关节在步态站立后期达到约72度的峰值,这是区分正常与病理步态的关键数据。 |
构建运动模式的“数据库”,实现精细化轨迹预测。 |
|
微观组织级 |
肌肉激活信号、肌力 |
表面肌电(sEMG)、超声传感器 |
解码神经驱动的“源代码”。研究发现,在动作开始前约100毫秒,肌肉会出现特征性的爆发式激活。 |
提供“前馈信号”,真正实现意图的提前预测,是HMIP的时间优势所在。 |
这套“身体-关节-肌肉”的三层感知体系,不再是孤立地收集数据,而是像建立一个完整的“人体数字孪生”模型,让AI不仅能“看到”你在动,更能“理解”你为什么动。
在算法层面,综述明确指出,处理这种复杂、多模态的生物力学信号,必须依靠深度学习的力量。
“与传统机器学习依赖手工特征工程相比,深度学习(如CNN、LSTM、Transformer)可以通过端到端的网络架构,直接从原始信号中学习层次化的特征表示,自主捕捉多传感器模态之间的潜在时空相关性。”
例如,结合IMU和sEMG数据,采用CNN-LSTM混合模型,能够将复杂运动场景下的意图预测精度提升10%以上。而针对实时性需求,时序卷积网络(TCN)等轻量化模型,也能在保证低延迟(<200ms)的同时,实现精准预测。
综述汇总了大量前沿研究的实验数据,证明了多模态融合框架的优越性:
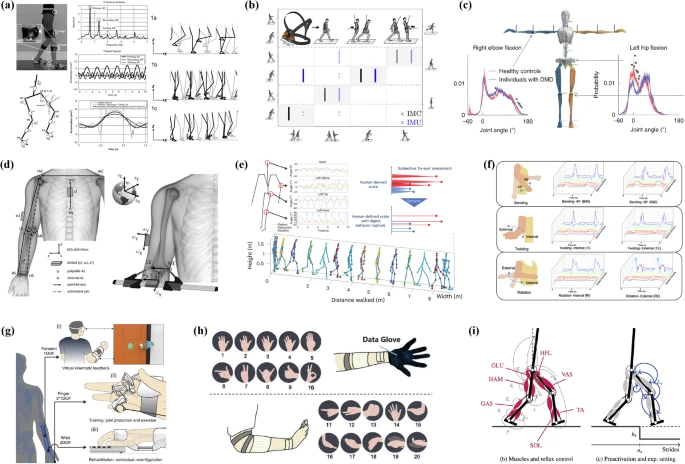
图 2 | 人体运动的基本生物力学特征及其代表性应用
a 通过重力加速度估计程序预测步态轨迹,图片经许可改编自参考文献57。
b 通过躯干加速度预测人体运动与平衡恢复响应,图片经许可改编自参考文献58。
c 捕捉主要骨骼关节矩阵以记录全身运动行为,用于疾病进展预测,图片经许可改编自参考文献59。
d 使用基于解剖轴坐标系分析肘关节活动,图片经许可改编自参考文献60。
e 捕捉运动数据的帧序列以分析运动状态,图片经许可改编自参考文献61。
f 使用关节感应肘套与波形可视化进行肘部手势识别,图片经许可改编自参考文献62。
g 通过肌肉触觉设备实现动态关节运动控制,图片经许可改编自参考文献63。
h 通过前臂-腕部表面肌电(sEMG)可穿戴设备评估手势变化趋势,图片经许可改编自参考文献64。
i 利用肌肉预激活技术增强人体行走鲁棒性,图片经许可改编自参考文献65。
在假肢控制中,仅依靠肌电信号的模式识别准确率可能卡在85%左右,而引入惯性传感器(IMU)的关节运动信息后,通过LDA或SVM分类器,在复杂环境下的运动意图识别率可提升至97.8%。
在外骨骼控制中,利用Transformer网络对多模态数据进行全局建模,对于下肢运动模式的识别准确率高达97.8%,远高于传统方法。
在跌倒监测中,通过IMU捕捉躯干加速度的突变特征,结合机器学习模型,对建筑工人等高风险人群的“近跌倒”事件检出率可达86.4%,并实现了**93.0%**的异常步态召回率。
这些数据有力地证明,只有当传感器网络与AI算法深度协同,HMIP系统才能真正从实验室走向现实。
这项技术突破的意义,远不止于学术本身。它正在为人机交互开启一个全新的时代。
1)医疗康复领域的“个性化重生”
对于截肢患者,基于HMIP的智能假肢将不再是简单的机械替代,而是能感知神经信号、预测运动意图的“新肢体”。对于中风患者,康复机器人可以根据其关节力矩和肌肉激活的实时状态,动态调整训练方案,实现真正的个性化治疗。
2)工业场景的“人机共融”
在制造业,工人穿戴的智能外骨骼不再是被动承重,而是能主动预测工人的搬运、抬举动作,在关键时刻提供精准的助力,大幅降低工伤风险,提升人机协作效率。
3)竞技体育的“极限优化”
运动员穿上集成电子纺织(E-textiles)的运动服,教练组可以实时监测其肌肉协同模式,提前预警因疲劳导致的动作变形,将运动损伤的风险降至最低,并挖掘最大潜力。
4)虚拟现实的“感官闭环”
当HMIP与触觉反馈结合,你在虚拟世界中“抓取”一个杯子时,系统通过预测你的抓握意图,提前在手套上模拟出杯子的触感,这种沉浸感将是颠覆性的。
综述指出,未来HMIP系统将向着 “感知-决策-执行” 的一体化自适应系统发展。通过自监督学习、个性化生物力学模型、以及边缘计算技术的结合,系统将摆脱对云端和大型标注数据集的依赖,变得更智能、更鲁棒、更轻便。
尽管蓝图令人振奋,但正如这篇综述所强调的,HMIP技术距离大规模商业化落地,依然面临严峻挑战。
首先是标准化和鲁棒性问题。 目前,生物力学特征的选择和量化标准尚未统一,不同研究的模型难以复现和迁移。更重要的是,肌电信号极易受到出汗、电极位移和肌肉串扰的影响,如何在复杂、动态的真实环境中保证信号质量,是悬而未决的难题。
其次是算力与隐私的平衡。 高精度的深度学习模型意味着巨大的计算开销,而将数据上传云端又会带来隐私泄露的风险。如何在本地实现低功耗、高效率的实时计算,是硬件和算法必须共同回答的问题。
最后,是伦理和监管的真空。 当机器能精准预测你的意图,谁有权访问这些数据?当系统做出错误预测导致伤害,责任又该如何划分?对于脑机接口等更敏感的技术,更需要建立清晰的伦理标准和法规。
总而言之,这篇综述为我们描绘了一个激动人心的未来,但通往未来的路,仍需在材料、算法、安全和伦理的交叉地带,一步一个脚印地踏实前行。
[1]Chen, S., Peng, C., Yang, B. et al. Recent advances in intelligent wearable systems: from multiscale biomechanical features towards human motion intent prediction. npj Artif. Intell. 2, 33 (2026). https://doi.org/10.1038/s44387-026-00083-5
END
编辑 | 郝娅婷
排版 | 张艳青
审核 | 医工学人理事会
扫码加入医工学人,进入综合及细分领域群聊,
参与线上线下交流活动

推荐阅读
Science Advances | 中山大学团队最新研究:人工智能赋能的“遗传式非侵入性细胞内记录”用于心脏动作电位的长期监测
点击关注医工学人

本篇文章来源于微信公众号: 医工学人
