






星标“医工学人”,第一时间获取医工交叉领域新闻动态~

2025年11月26日,主要由浙江大学多个院系及附属医院的研究团队,联合上海科技大学等机构共同在《Nature》上发表一项研究,题为“Slipknot-gauged mechanical transmission and robotic operation”(基于活结的机械力传输与机器人操作),从“打结”这一古老技艺中发掘出全新的“机械智能”范式。他们通过精确设计的“活结”结构,将其转变为无需电子传感器的力信号编码与传输单元,在手术缝合中实现了高达95.4%的力控一致性。这项技术不仅能将低年资外科医生的打结力精度提升121%,还能无缝集成于现有腹腔镜及机器人手术系统,为资源有限的医疗场景和安全的机器人交互提供了一种极简、低成本且智能的解决方案。

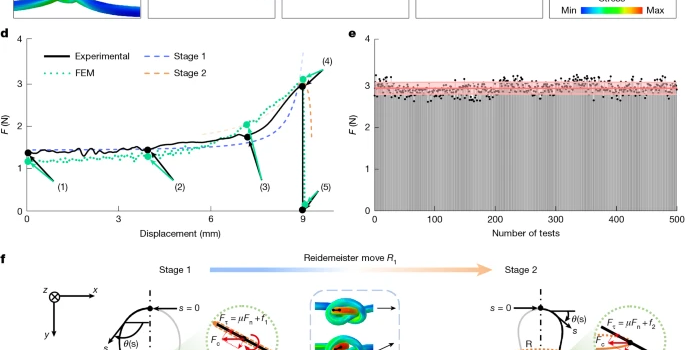
在精密机械与外科手术的世界里,“力”的感知与控制是决定成败的核心。无论是机器人进行精密的装配,还是外科医生进行关键的血管或组织缝合,施加多大的力、如何保持力的精确与一致,始终是巨大挑战。 微创手术的“手感缺失”: 在传统开放式手术中,外科医生可以通过手指直接感受组织的张力和反馈。但在腹腔镜或机器人辅助的微创手术中,医生通过长杆器械操作,丧失了直接的触觉感知,被称为“手感缺失”。他们只能依赖视觉,通过观察组织变形来估算张力,这带来了极大的个体差异和不稳定性。用力过猛可能导致组织缺血坏死,力不足则会引起吻合口漏,增加高达30%以上的死亡率。 机器人的“力控瓶颈”: 尽管机器人手术精度高、稳定性好,但主流的商业手术机器人(如达芬奇系统)普遍缺乏集成的力反馈功能。操作者同样只能“盲视”操作,难以精确控制缝合或夹持的力度。加装电子力传感器不仅成本高昂、系统复杂,还面临灭菌、小型化和长期可靠性的挑战。 电子方案的现实局限: 在空间受限的微创环境、电力匮乏的野外或灾区,复杂的电子传感与控制设备往往难以部署或失效。传统方案的核心矛盾在于:精密的力控制依赖复杂的电子系统,而电子系统本身却在许多关键场景中成为“阿喀琉斯之踵”。 研究团队提出的解决方案,出人意料地回归到人类最古老的技艺之一:打结。他们并非简单使用活结,而是通过拓扑学设计和精确的预紧工艺,将其转化为一种“机械智能”的核心元件——“滑结计量”(Slipknot-Gauged)机制。 图1:基于活结的线材机械信息传输示意图。a,一系列活结在绳线上传输力信号谱以计量机械臂操作的示意图。b,活结中机械信息的写入与读取过程。通过以特定输入力打结,将机械信息写入活结。力学模型处理该输入力,并整合物理因素与拓扑结构等特征。随后,通过拉动活结的解结过程,机械信息以峰值力 FpeakFpeak 的形式输出。c–e,该活结计量机械传输策略在包括微操作 (c)、协同操作 (d) 和重载救援任务 (e) 在内的多种场景中得到验证。比例尺:1 mm (c)、2 cm (d) 或 10 cm (e)。 核心原理:力信号“写入”与“读出” 1. 写入:在制作活结时,以预设的力“F_tying”将其收紧。这个力的大小决定了结内环与滑环之间的接触面积、摩擦和弹性形变,就像将“力信息”编码进了结的几何构型中。 2. 读出:当需要释放这个结时,只需持续拉动绳子的自由端。在拉动过程中,拉力逐渐增加,直至滑环发生一次关键的拓扑变化(Reidemeister移动),此时拉力达到一个峰值“F_peak”,随后结瞬间打开,拉力骤降。这个峰值“F_peak”就是被“写入”并“读出”的力信号,它与预设的 F_tying 呈稳定的定量关系。 创新本质: 该技术将一个动态的、非线性的打结/解结过程,转化为了一个可重复、可量化的“力-位移”事件。活结本身成为了一个无源的、纯机械的力传感器和限位器。 新旧技术对比 研究的严谨性体现在多层次的实验验证中,从基础力学表征到活体动物手术,构建了完整的证据链。 1. 力学一致性与可调性验证: – 一致性:用同一参数制备500个活结,其释放时的峰值力“F_peak”为 2.945 ± 0.135 N,一致性高达95.4%。这证明了该方案的可靠性。 – 可调性:通过改变预紧力“F_tying”、绳结圈数(单圈、双圈、三圈)或线材直径,可以线性地调节 “F_peak”的大小,从而适应不同组织(如结肠、血管)所需的理想缝合张力。 图2:活结的力学建模与表征。a-c,通过高速摄影 (a)、微CT扫描 (b) 和有限元结果 (c) 捕获的活结打开过程快照。比例尺为 1 mm。当首次发生Reidemeister移动 R₁ 时,活结从初始状态(第一列)缓慢过渡至滑脱状态(第四列),随后迅速打开(最后一列)。d,活结的实验与模型(包括理论与数值)力-位移曲线。理论模型包含 R₁ 移动发生前(阶段1)与发生后(阶段2)两个阶段。e,在一条预紧力 F_tying = 7.500 N 的氟碳单丝上制作的500个活结的 F_peak 值分布。数值位于 2.945 ± 0.135 N 区间内(平均值 ± 标准差,n = 500 个独立样本),一致性达到95.4%。f,R₁ 移动前后两个阶段的力学模型。黑色与灰色线条表示杆件部分,橙色管状物表示约束。插图展示了仿真中的 R₁ 移动。g,在不同配置(单结环、双结环与三结环)下实验测得的 F_peak 值(平均值 ± 标准差,n = 5 个独立样本)。h, i,F_peak 随时间 (h)(平均值 ± 标准差,n = 5 个独立样本)及测试速度 (i)(平均值 ± 标准差,n = 5 个独立样本)的变化,验证了活结在长期与动态测试中的稳定性。图中点表示实验数据,线条表示平均值,阴影区域反映不确定性。图中灰色区域表示不稳定区域。 2. 外科手术效果验证(动物实验): – 提升新手水平:在模拟手术中,使用传统缝线,低年资医生的打结力变异度显著高于高年资医生。而使用集成活结的“滑结线”(Sliputure)后,低年资医生的打结力精度提升了121%,其表现甚至超越了使用传统缝线的高年资医生。 – 优化愈合效果:在大鼠结肠损伤修复模型中,使用滑结线的组别,其组织血供恢复更好,术后粘连更少。关键指标“爆破压”在术后第5天即达到健康水平,比传统缝线组提前了2天,表明愈合加速。组织学分析显示,滑结线修复的组织炎症反应更偏向抗炎修复型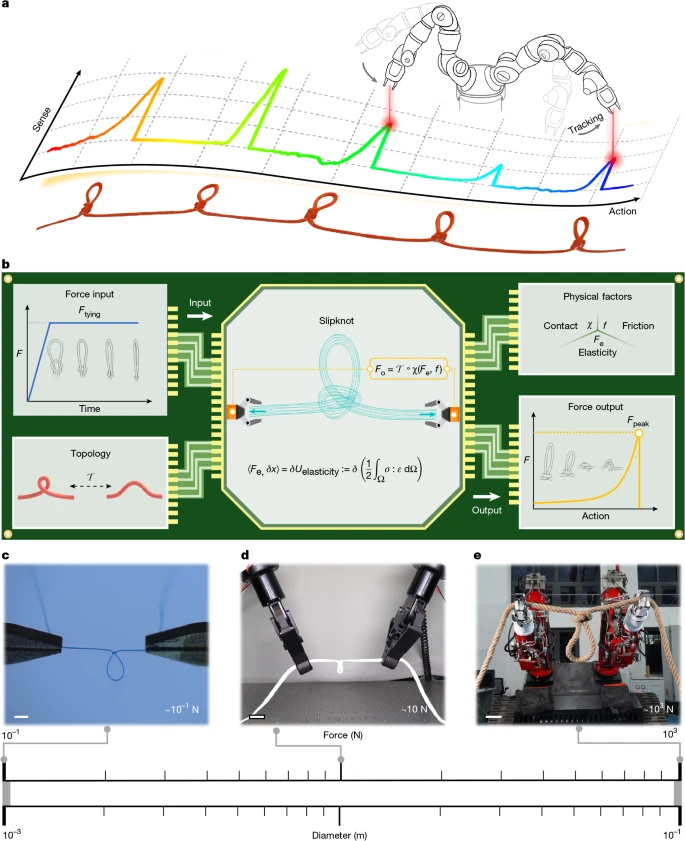
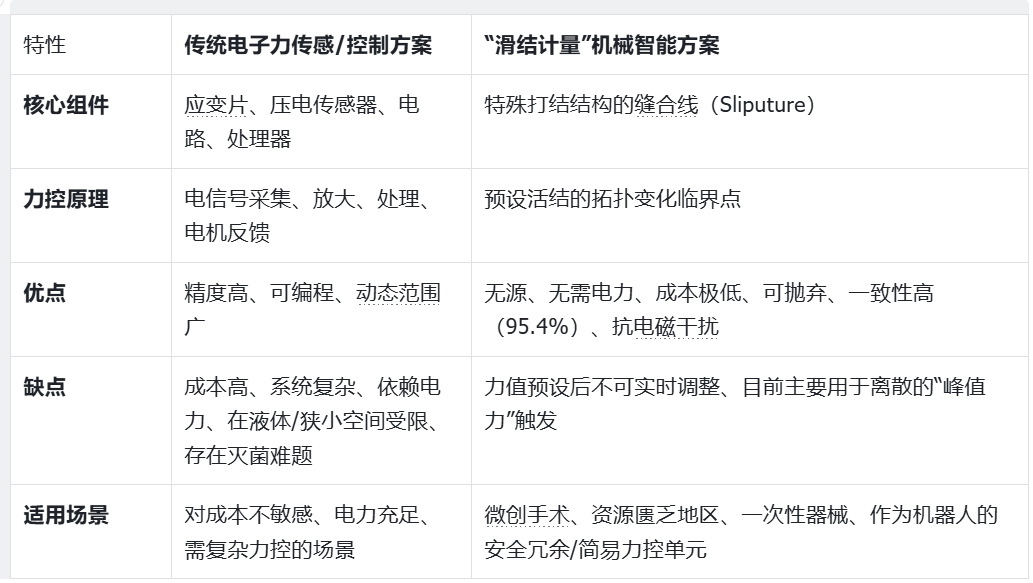
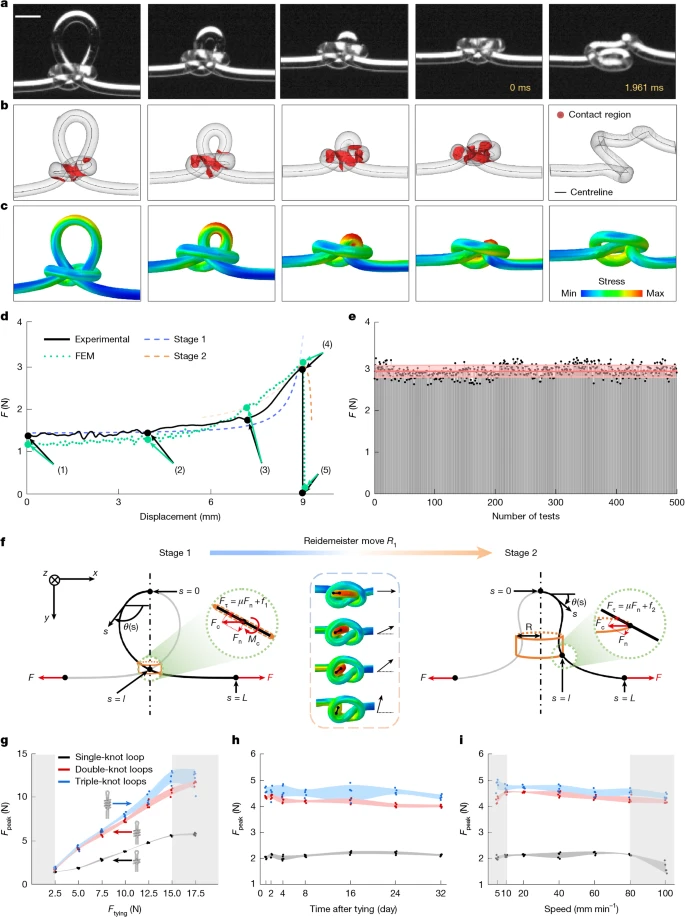
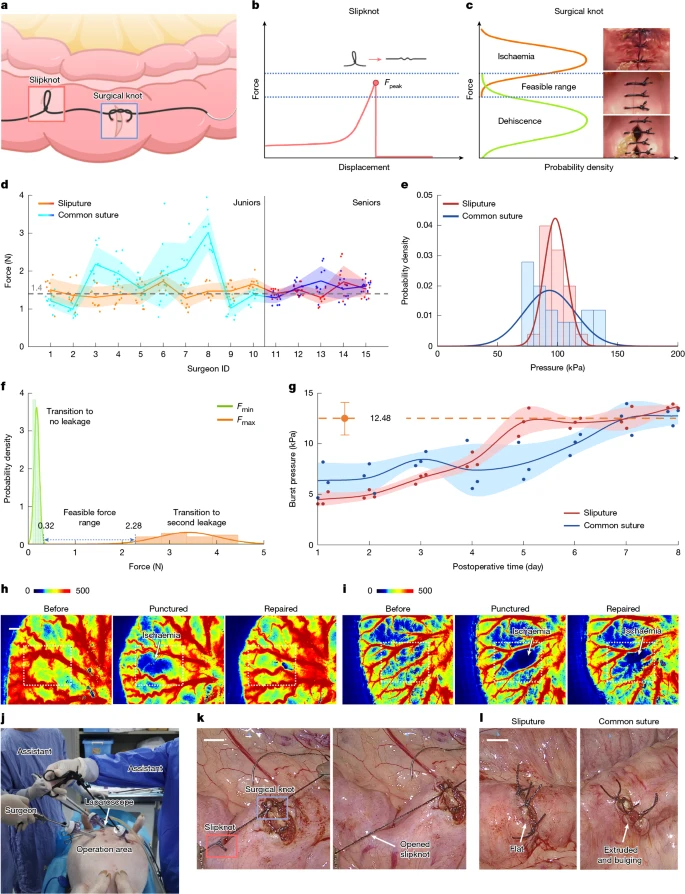
图3:活结在外科手术中的机械力传输计量。a,带有活结(红色框)的缝合线将预编码的力传递至外科结(蓝色框),该缝合线被称为”滑结线”。b,活结打开时产生 F_peak 以传递机械信息。c,F_peak 在打结过程中被传递至外科结。在可行范围内的合适打结力产生平坦的伤口闭合(中图)。反之,过大的力导致局部缺血(上图),而力不足则导致吻合口漏(下图)。d,低年资外科医生(n = 10;独立参与者)与高年资外科医生(n = 5;独立参与者)的打结力(平均值 ± 标准差;色带表示标准差)(n = 10;独立实验)。使用普通缝线时,低年资医生表现出较低的力精度。未经培训使用滑结线后,低年资医生的力精度显著提高,甚至超过了使用普通缝线的高年资医生。e,使用滑结线时切口压力的概率密度分布更集中(n = 25;独立实验)。f,离体大鼠结肠损伤修复的可行力范围(n = 20;独立生物学重复,蓝色区域),由 F_min(绿色,过渡至无渗漏)和 F_max(橙色,过渡至二次渗漏)定义。g,爆破压(平均值 ± 标准差;色带表示标准差)显示,滑结线修复组初始压力较低,但在第5天达到平台期,比普通缝线组早2天(n = 3;独立生物学重复)。h,i,活检穿刺后,分别使用滑结线 (h) 或普通缝线 (i) 修复的大鼠结肠血管可视化激光散斑血流成像(LSCI)图。虚线框标记穿刺区域,显示滑结线修复改善了血供。色条代表相对灌注单位。j,外科医生使用滑结线配合腹腔镜器械进行操作的照片。k,在活猪结肠损伤腹腔镜修复中使用滑结线的打结过程。l,腹腔镜手术修复的猪结肠区域在使用滑结线修复后外观平坦(左),而使用普通缝线修复后则呈膨出状(右)。比例尺:1 mm (h) 或 5 mm (k,l)。
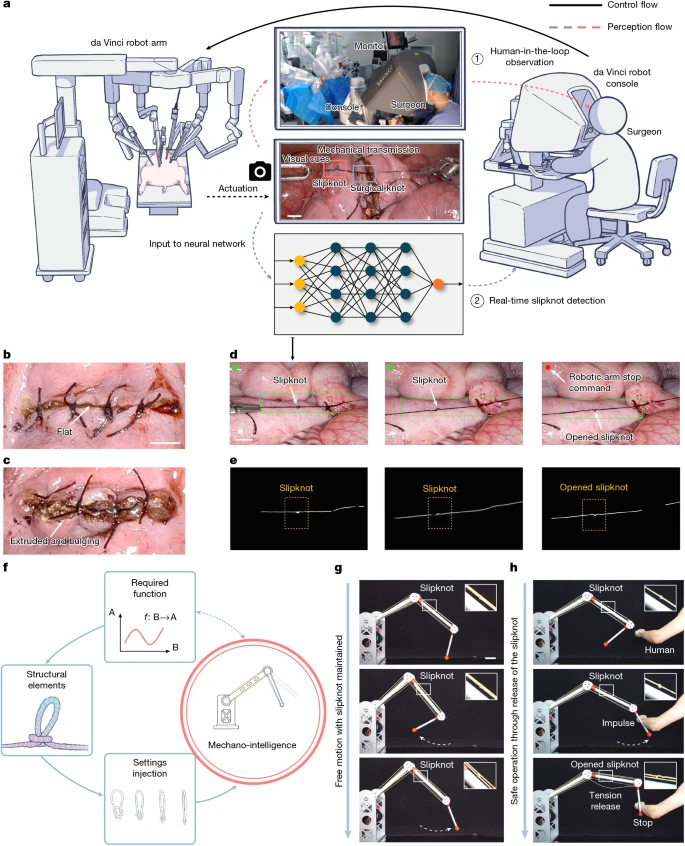
3. 与现有手术系统集成验证: – 腹腔镜/机器人手术:研究在活猪模型上成功演示了滑结线在腹腔镜和达芬奇机器人手术中的应用。通过视觉识别算法,系统能自动检测滑结打开的瞬间,并发送指令停止机械臂,防止过拉。结果显示,使用滑结线后,切口压力分布的一致性显著优于传统缝线,验证了其在真实手术场景下的有效性和易用性。 图4:活结计量的机器人智能操作。a,滑结线在机器人手术中的机械力传输路径。实时成像为操作者和机器人提供视觉提示,以实现智能操作来计量外科打结力。b, c,通过机器人手术修复的活猪结肠组织区域显示,使用滑结线 (b) 修复后外观平坦,而使用普通缝线 (c) 则出现组织外翻和膨出。比例尺,5 mm。d,一个使用滑结线实现主动机械臂运动控制的闭环机器人系统,通过在一项活体猪模型的基于视觉的自动制动实验中得到验证。实时图像处理用于检测活结。活结打开后,激活停止指令以终止机械臂运动。比例尺,5 mm。e,活结从RGB图像中被检测出来,并转换为实时灰度图像。通过将图像与打开的活结构型进行匹配,来检测活结的打开状态。f,活结计量机械传输的规程和方法。g, h,活结增强的更安全人机交互。比例尺,5 cm。g,所提出的集成活结的肌腱驱动机械臂展示了在保持活结闭合状态下,肘关节和腕关节的自由运动能力。h,在人机交互过程中,当机器人因不当操作而过载时,活结将打开并释放张力,从而为操作提供安全保障。
这项研究的价值远超一项具体发明,它揭示了一种全新的“机械智能”(Mechano-intelligence)设计范式。
1. 对医疗领域的颠覆潜力
– 普惠外科:极低的成本(仅为特殊结构缝线)使其能在基层医院、战地医院、太空任务或灾难救援等资源受限场景中,提供高水准的标准化缝合力控,缩小医疗水平的地域差异。
– 机器人手术标准化:为现有缺乏力反馈的手术机器人提供了一种简易、可靠的“视觉-机械”混合力控方案,有望成为手术机器人的标准耗材,大幅降低操作门槛,提升手术均质化水平。
– 外科培训革命:可作为一种客观、量化的培训工具,帮助医学生和低年资医生快速掌握精准的“手感”。
2. 超越医疗的广阔前景
– 安全机器人:研究已演示将滑结集成于肌腱驱动机械臂中,作为机械保险丝。当人机交互力超过阈值时,滑结断开,释放张力,保护人员和设备,无需任何电子安全装置。
– 微观世界的力控:团队甚至在DNA分子尺度进行了模拟,展示了“打结”机制在纳米尺度力传输的潜力。这表明,基于拓扑和结构变形的机械智能原理,可能在不同尺度的柔性机器、智能材料中产生广泛回响。
3. 商业化路径
技术商业化路径清晰:首先是作为新型智能缝合线进入医疗器械市场,随后可能作为机器人安全模块或通用力控元件扩展到工业、服务机器人领域。团队已开发出自动化的滑结制造设备,为大规模标准化生产铺平了道路。
尽管前景广阔,我们必须清醒地看到这项技术当前阶段的局限性与挑战: 1. 预设性与静态性:“滑结”的力阈值是预先设定且不可动态调整的。它适用于大量已知理想张力范围的标准手术步骤,但对于需要术中实时、连续、动态调整力度的复杂精细操作(如神经或血管的分离),目前方案力有未逮。 2. 环境干扰的稳健性:虽然实验测试了在不同液体(血液、生理盐水)中的性能,但在极端粘稠、含有大量碎屑或组织液成分复杂的环境中,结的摩擦系数和打开行为是否依然高度可预测,需要更广泛的验证。 3. 系统集成与认证:作为医疗器械,新型缝合线需要完成严格的三类医疗器械注册临床试验,并与现有手术器械、机器人系统的兼容性得到官方认证,这将是一个漫长的监管过程。 4. 认知接受度:让习惯于依赖电子读数和高科技设备的外科医生,信任并熟练使用一个看似“低科技”的机械结,需要观念转变和充分的培训。 这项研究最深刻的启示或许在于:在追求极致电子化和数字化的今天,重新审视那些蕴藏在古老技艺和天然结构中的“物理智能”,可能为解决一些最棘手的工程难题,打开一扇意想不到的窗户。它提醒我们,智能未必全部来自芯片与代码,有时也来自结构本身的精妙设计。
Xue, Y., Cao, J., Feng, T. et al. Slipknot-gauged mechanical transmission and robotic operation. Nature 647, 889–896 (2025). https://doi.org/10.1038/s41586-025-09673-w
END 撰文 | 郝娅婷 编辑 | 余帆 审核 | 医工学人理事会 扫码加入医工学人,进入综合及细分领域群聊,参与线上线下交流活动
推荐阅读
npj biomedical innovations | 中国科学技术大学研究从机械运动到电信号:雷达重建12导联心电图的临床验证
点击关注医工学人 
本篇文章来源于微信公众号: 医工学人
