






星标“医工学人”,第一时间获取医工交叉领域新闻动态~

从辅助康复的机械外骨骼,到精密操作的手术机器人,再到沉浸式体验的虚拟现实,先进的人机界面(Human-Machine Interfaces, HMI)正在深刻地改变我们的世界。这些技术成功的核心,在于能否精准、无缝地捕捉和理解人体的意图,尤其是肌肉的活动状态。然而,传统的肌电图(EMG)技术虽然能检测肌肉的主动收缩,却无法感知肌肉被动拉伸时的状态,丢失了大量关键信息。而光学、超声等方法又常常因为传感器的刚性而受到运动伪影的干扰,难以实现稳定、舒适的长期佩戴。
近日,一篇发表于国际顶尖期刊《Science Advances》的开创性研究,为我们带来了完美的解决方案。来自南洋理工大学的科研团队成功研发了一种柔性多通道电阻抗传感器(Flexible Multichannel Electrical Impedance Sensor, FMEIS),它像一层“智能皮肤”,能够无创地“看透”肌肉的收缩与舒张,为人机交互的未来开辟了全新的可能性。

这项研究的革命性意义在于其全新的传感原理、卓越的材料工程设计以及在多个前沿应用场景中的成功验证,为下一代HMI技术奠定了坚实的基础。
01
全新的传感维度:捕捉主动与被动肌肉状态
与只能“听”到肌肉放电信号的EMG不同,FMEIS通过向人体施加一个微弱、无感的电流,来“看”肌肉收缩或拉伸时引起的内部电场变化。当肌肉形态和电导率改变时,皮肤表面的电势分布会随之产生“涟漪”,FMEIS的多通道电极阵列便能精确捕捉这些涟漪。 这项技术最核心的突破在于,它不仅能检测肌肉的主动发力收缩,还能同样灵敏地感知肌肉在关节运动中被动拉伸的状态。这解决了EMG的根本局限,使得机器能够获得关于人体姿态和力量的更完整、更丰富的信息,从而做出更智能、更协调的反应。
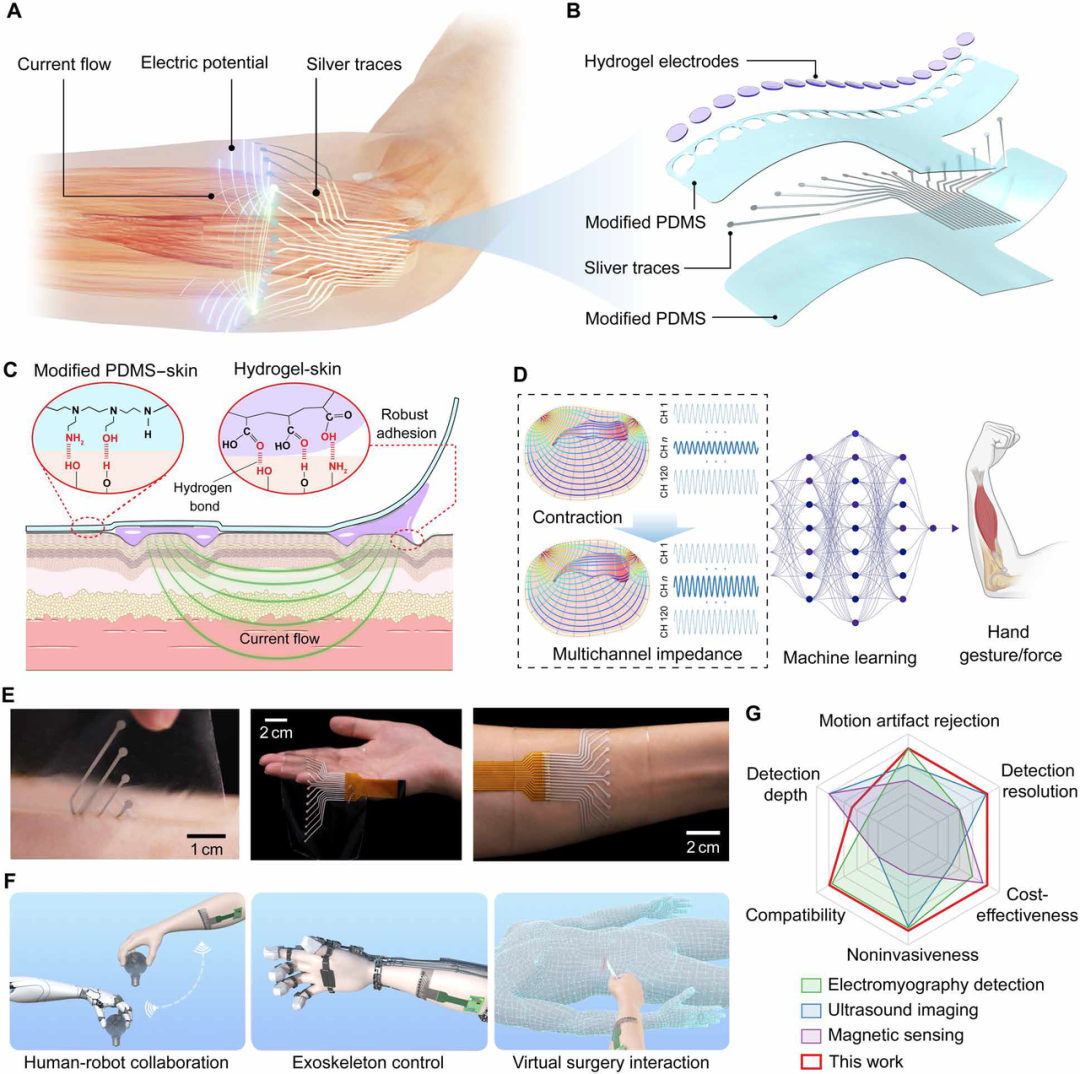
图1 FMEIS的设计、工作原理及应用概览(改编自论文图1)
图片说明:该图全面展示了FMEIS技术。A图和B图揭示了其工作原理和超薄、多层的柔性结构。C图展示了其通过氢键与皮肤牢固贴合的机制。D图示意了如何利用机器学习算法解码多通道阻抗信号来识别人体手势和力量。F图则展示了其在人机协作、外骨骼控制和虚拟手术三大领域的应用潜力。
02
极致的“亲肤”设计:超薄、柔软、可重复粘贴
为了实现无感的佩戴和精准的信号采集,研究团队在材料和结构设计上做到了极致。
-
超薄柔软: 整个传感器厚度仅约220微米,其弹性模量低至212.8千帕,与人体皮肤的力学性能高度匹配,确保了传感器能够完美贴合皮肤,并随皮肤一起自然变形。
-
稳定黏附: 传感器采用了经过特殊改性的PDMS材料作为基底,并配以导电水凝胶电极。这两种材料都能与皮肤形成稳定而可逆的氢键,从而实现牢固的粘贴。实验证明,传感器可以连续佩戴8小时,并可重复使用多天而黏附力不减,同时又易于撕下,不会损伤皮肤。 这种卓越的“亲肤”特性,从根本上解决了刚性传感器带来的运动伪影问题,保证了在动态活动中信号的稳定与可靠。
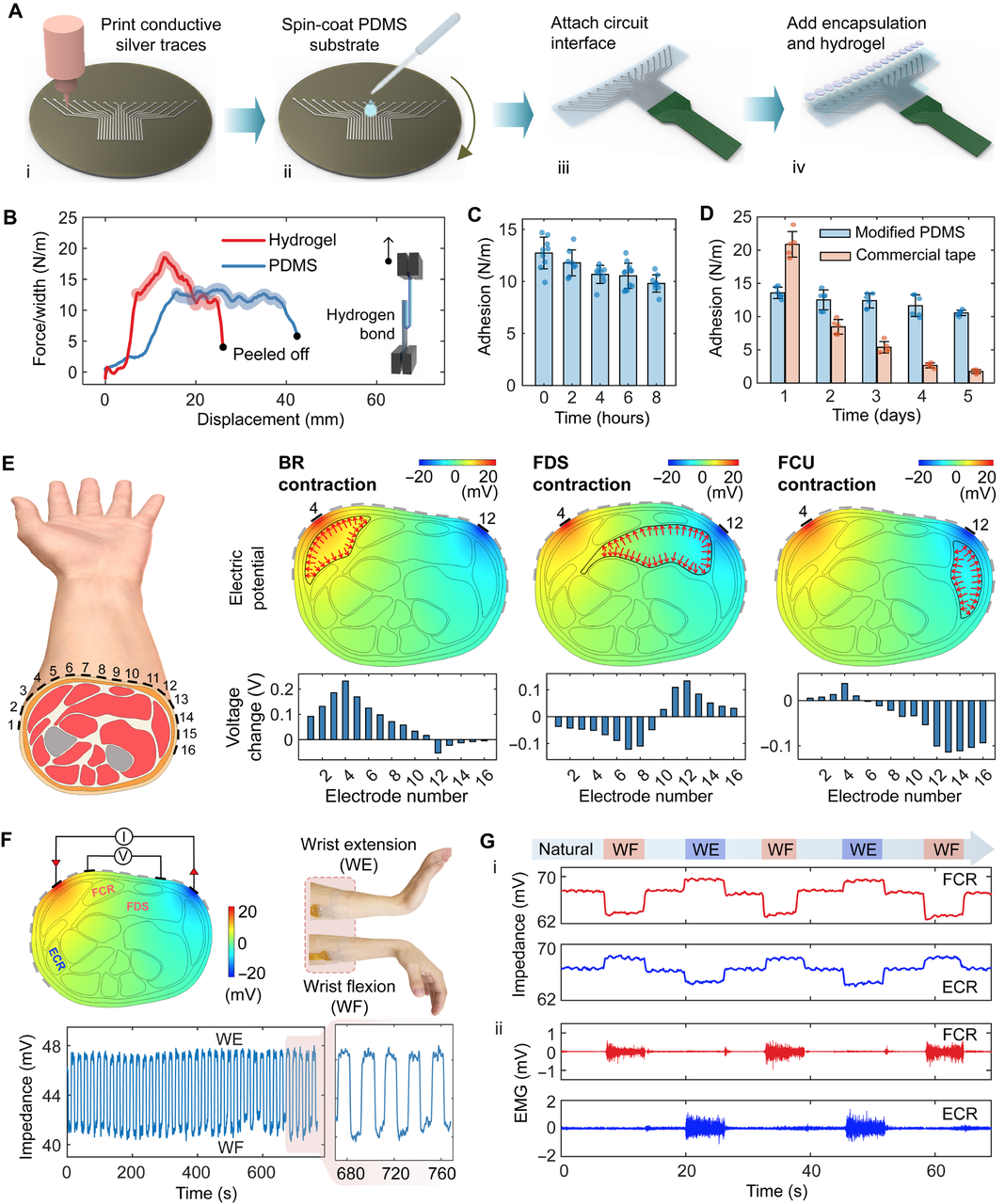
图2 FMEIS的制造、表征及与EMG的性能对比(改编自论文图2)
图片说明:该图展示了传感器的制造流程(A)和关键的力学性能表征,如黏附力测试(B, C, D)。最关键的是G图,它将FMEIS测量的阻抗信号与传统EMG信号进行直接对比,清晰地证明了FMEIS能够同时捕捉肌肉主动收缩和被动拉伸(阻抗信号有高低两种稳定状态),而EMG信号仅在主动收缩时出现(仅有峰值)。
03 “AI大脑”赋能:高精度的意图解码 FMEIS采集到的多通道阻抗数据形成了一个复杂的“电场模式图”。研究团队利用机器学习算法,对这些高维数据进行智能分析和解码。实验结果显示,该系统在识别10种常用手势时,准确率高达98.49%;在预测捏力等肌肉力量时,其预测值与真实值的相关性(R²值)达到了惊人的0.98。这证明了FMEIS结合AI,能够将肌肉的生理活动高效、准确地翻译成机器可以理解的指令。
04 三大前沿应用的成功演示 文章通过三个令人印象深刻的实验,展示了FMEIS作为下一代HMI的巨大潜力:
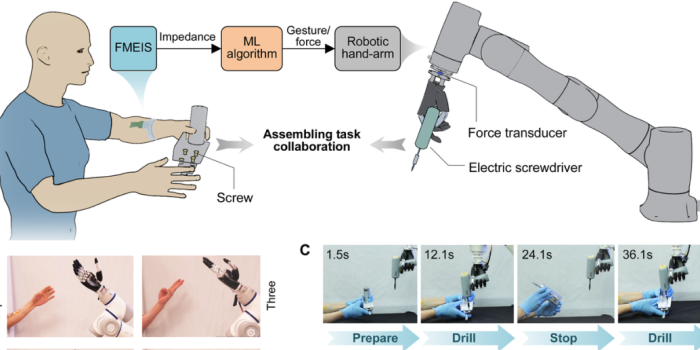
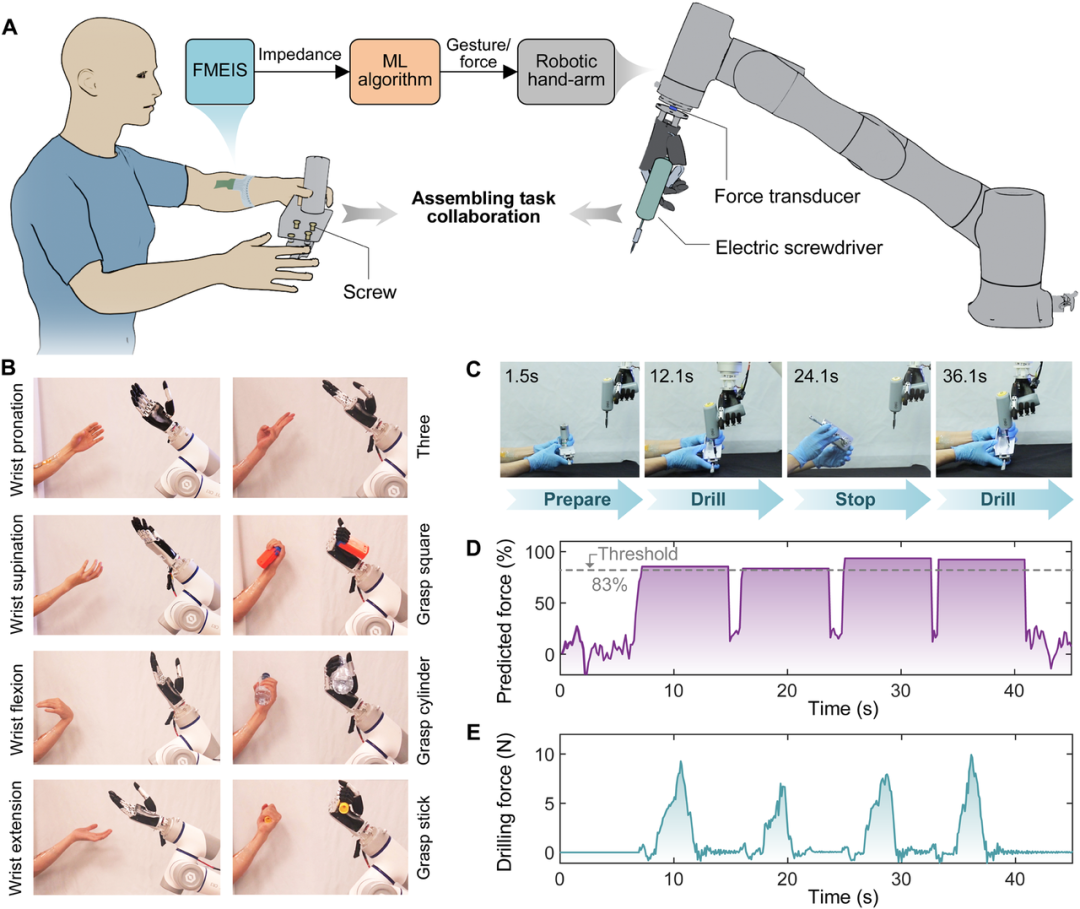
人机协作装配: 操作员佩戴FMEIS,通过手势和发力,与机器人手臂协同完成复杂的螺丝安装任务。FMEIS能够实时监测人手的抓握力,确保机器人在安全的状态下作业,展现了其在保障人机交互安全方面的独特价值。 机械外骨骼控制: FMEIS被用于控制一个气动手部外骨骼。它能根据佩戴者的发力意图,实时调节外骨骼的辅助力度,不仅显著增强了用户的抓握力(最大力量提升约65%),还能有效缓解肌肉疲劳。 虚拟手术界面: 在模拟手术中,外科医生佩戴FMEIS,其手部的精细动作和切割力度被实时、精准地映射到虚拟现实环境中,实现了高度逼真的远程手术操作。
图3 FMEIS在人机协作场景中的应用(改编自论文图4)
图片说明:该图生动地展示了FMEIS在人机协作任务中的应用。操作员佩戴传感器(A),通过手势控制机器人(B)。在协同装配时(C),FMEIS实时预测人手的夹持力(D),只有当夹持力超过安全阈值时,机器人才会启动电钻(E),从而确保了操作员的安全。
总而言之,《用于协作式人机界面的柔性多通道肌肉阻抗传感器》这项研究,通过在传感原理、材料科学和智能算法三个层面的协同创新,成功开发出一种能够全面、精准“解码”肌肉语言的“智能皮肤”。它克服了传统肌电技术的根本局限,并以其超薄、柔软、亲肤的特性,为实现真正无感、高效、安全的人机交互铺平了道路。这项技术预示着,未来的机器人、外骨骼和虚拟系统将不再是冰冷的机器,而是能够与我们心意相通、协同共生的智能伙伴。
▼参考资料
Li, J., Wu, K., Xiao, J., Chen, T., Yang, X., Pan, J., Chen, Y., & Wang, Y. (2025). Flexible multichannel muscle impedance sensors for collaborative human-machine interfaces. Science Advances, 11(26), eadv3359. https://doi.org/10.1126/sciadv.adv3359
END 撰文 | 张越青 编辑 | 吴苡齐 审核 | 医工学人理事会 扫码加入医工学人,进入综合及细分领域群聊,参与线上线下交流活动
推荐阅读
点击关注医工学人

本篇文章来源于微信公众号: 医工学人
