






星标“医工学人”,第一时间获取医工交叉领域新闻动态~

在微创手术中,将CT与MRI的术前规划精准映射到术中实时导航,始终受制于刚性标记物的“多模态失明”与患者不适。韩国多家顶尖机构联合开发了一款可贴合皮肤的柔性电子标记,首次将红外μLED、银片-弹性体CT对比材料与含钆凝胶的MRI可见性集成于一身,并在机器人辅助乳房模型手术中实现了0.26毫米的靶向误差。这不仅意味着手术导航精度的跃升,更可能推动“一次贴附、多模态融合”成为未来智能手术室的新标准。

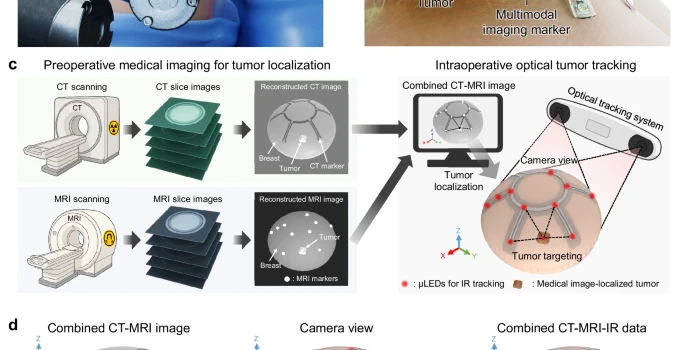
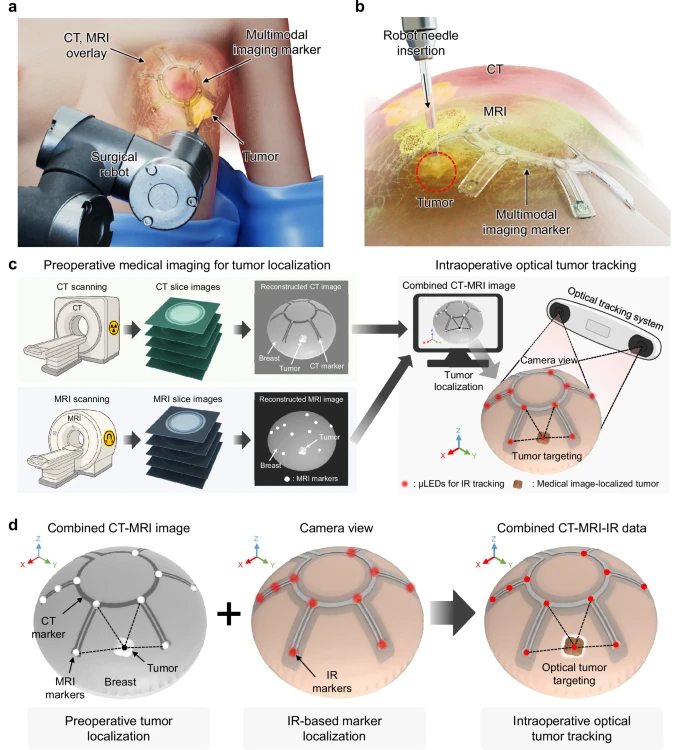
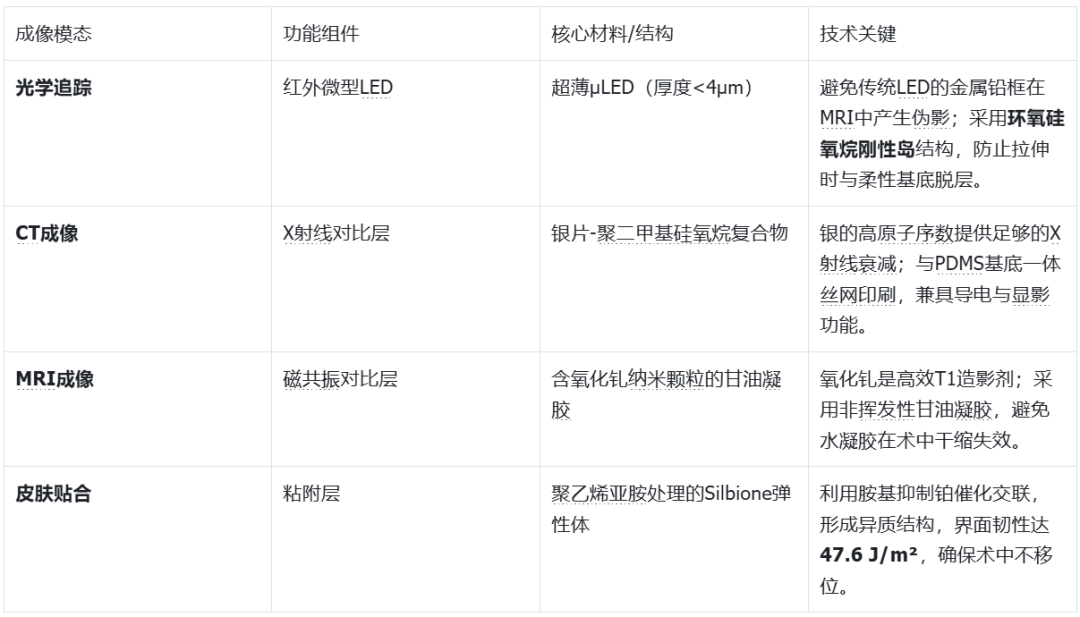
现代微创手术越来越依赖手术导航系统——它像一张无形的“地图”,将患者的CT、MRI等术前影像与术中实时位置精准叠加,引导医生或机器人直抵病灶。这张“地图”的基石,是贴在患者皮肤或解剖结构上的参考标记物。光学追踪系统通过捕捉这些标记物的位置,完成从影像空间到手术空间的坐标转换。 然而,传统标记物正面临一个根本性的悖论: 刚性不匹配:多数标记物由硬质塑料或金属制成,难以贴合皮肤等柔软曲面。在动态手术中,细微的位移就可能导致毫米级的定位偏差——这在脑外科或脊柱手术中是不可接受的。 多模态“失明”:术前规划依赖CT或MRI,术中导航依赖光学追踪。但现有标记物往往“只能看见一种光”。LED标记在CT下不显影;金属标记在MRI中会产生巨大的磁化率伪影,导致图像局部扭曲、信号丢失。这意味着临床团队不得不使用多套标记物反复配准,不仅效率低下,更引入了额外的误差。 这篇发表在npj Flexible Electronics(影响因子15.5)上的研究,正是对准了这一长期存在的“翻译”难题——如何让同一个标记,在CT、MRI和光学追踪三种“语言”下都清晰可见,同时还能温柔地贴合皮肤。 研究团队没有试图用单一材料“一鱼三吃”,而是巧妙地将标记物拆解为三个功能层,分别对应三种成像模态,再通过柔性基底集成为一体。 图 1 | 用于手术导航系统的多模态成像标记物概述。 a 机器人辅助乳腺肿瘤手术的示意图。该系统集成了手术导航系统与多模态成像标记物,用于位置配准。 b 机器人辅助乳腺肿瘤手术的放大示意图。 c 使用该成像标记物的手术导航系统整体流程。将器件贴附于手术部位,通过医学影像对肿瘤进行定位。从医学影像中获取的空间数据使得光学追踪能够实现精确的手术导航。 d 图像配准过程。通过术前 CT/MRI 标记物识别的肿瘤坐标,与术中红外追踪进行配准,以实现实时定位。
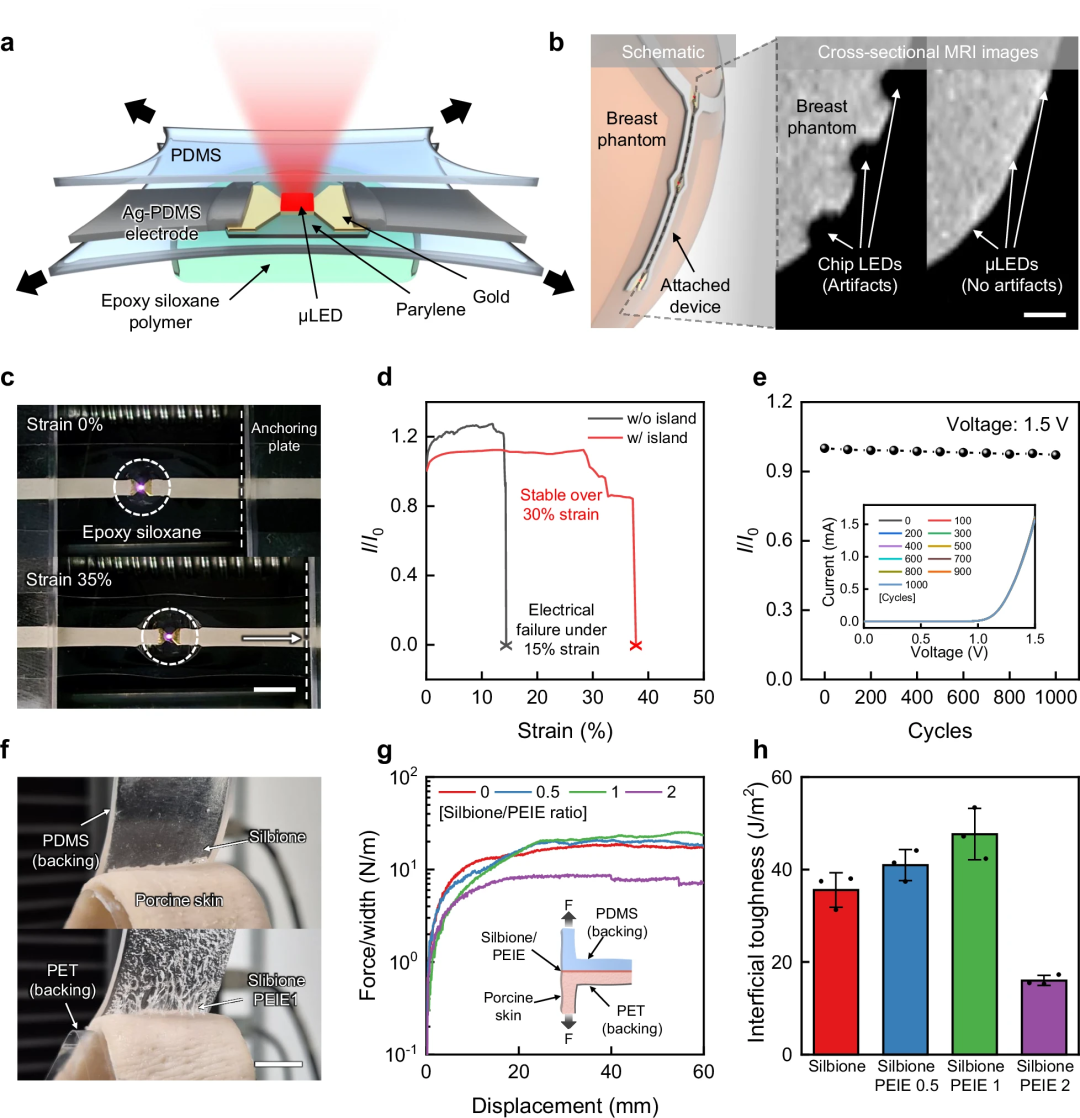
技术点睛:传统芯片级LED因含有毫米级金属支架和焊点,在MRI中会像“黑洞”一样吞噬局部信号。而μLED的半导体层与纳米级金属电极,体积小到几乎不扰动磁场,首次实现了“有源红外标记”与“MRI无伪影”的兼容。 在机械可靠性上,研究团队引入了一个精妙的“刚性岛”设计。由于μLED区域的聚对二甲苯基底与外围的PDMS基底模量不匹配,拉伸时极易在界面处脱层。他们将环氧硅氧烷聚合物作为“岛屿”包裹μLED,利用其与PDMS相似的硅氧烷主链实现强键合,有效分散应力。数据显示,该结构在30%拉伸应变下循环1000次后,仍能保持97%的初始电流——足以应对皮肤随呼吸、体位变化的动态形变。 图 2 | 用于光学追踪并具备皮肤共形粘附能力的可拉伸红外 μLED。 a 可拉伸红外 μLED 的分解结构示意图。 b 器件贴附于乳房体模的示意图,以及芯片式 LED 与 μLED 的 MRI 切片图像。芯片式 LED 因磁化率差异及由此引起的局部磁场畸变,会在 MRI 中产生伪影。比例尺,10 mm。 c 可拉伸 μLED 在未拉伸状态及 35% 拉伸应变下的照片。比例尺,5 mm。 d 有无环氧硅氧烷刚性岛结构时,可拉伸 μLED 在持续施加电压下的归一化电流(I/I₀)。 e 可拉伸 μLED 在 30% 应变循环拉伸下的归一化电流(I/I₀)。插图为多次拉伸循环后 μLED 的电流-电压曲线。 f 在猪皮上进行 180° 剥离测试以评估 PEIE 处理后的 Silbione 弹性体粘附性能的照片。比例尺,10 mm。 g 在猪皮上对 PEIE 处理后的 Silbione 弹性体进行 180° 剥离测试所得的力/宽度-位移曲线。 h PEIE 处理后的 Silbione 弹性体粘附于猪皮的界面韧性。误差线表示标准差(n = 3)。
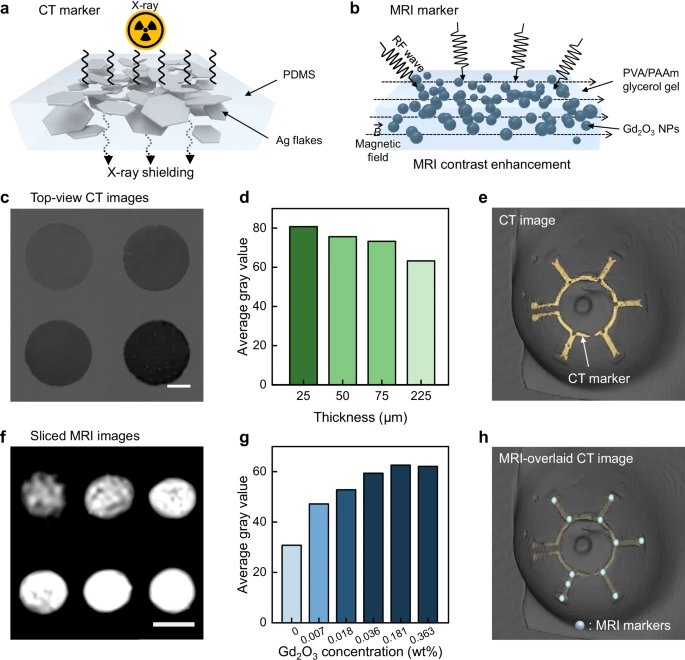
为了验证这套“多模态翻译系统”的实际效果,研究团队设计了一套严密的验证流程。 在乳房体模上,他们将标记物贴附后分别进行CT与MRI扫描,再通过光学追踪系统捕捉μLED坐标。计算结果显示: 这表明,通过单一标记物,CT/MRI的术前规划可以精确映射到术中光学追踪空间,误差控制在亚毫米级。 图 3 | CT 与 MRI 标记物在医学成像中的可见性。 a CT 标记物的结构示意图。 b MRI 标记物的结构示意图。 c 不同厚度(25、50、75 及 225 μm)CT 标记物的 X 射线图像。比例尺,2 mm。 d 使用 ImageJ 量化的不同厚度 CT 标记物的平均灰度值。 e 贴附于乳房体模的器件的 CT 重建图像。 f 不同 Gd₂O₃ 浓度(0、0.2、0.5、1、5 及 10 mM)下 MRI 标记物的 MRI 切片图像。比例尺,2 mm。 g 使用 ImageJ 量化的不同 Gd₂O₃ 浓度下 MRI 标记物的平均灰度值。 h 贴附于乳房体模的器件的 MRI 重建图像。
最具说服力的实验是将整个系统接入机器人手术平台。研究团队搭建了一个包含机器人基座、光学追踪器、探针标记和CT影像坐标的多层校准链。实时追踪μLED的位置后,机器人根据术前CT规划自动调整角度进行穿刺。最终,靶向误差仅为1.48像素(对应0.26毫米)。这一精度已超越多数临床商用导航系统的指标。
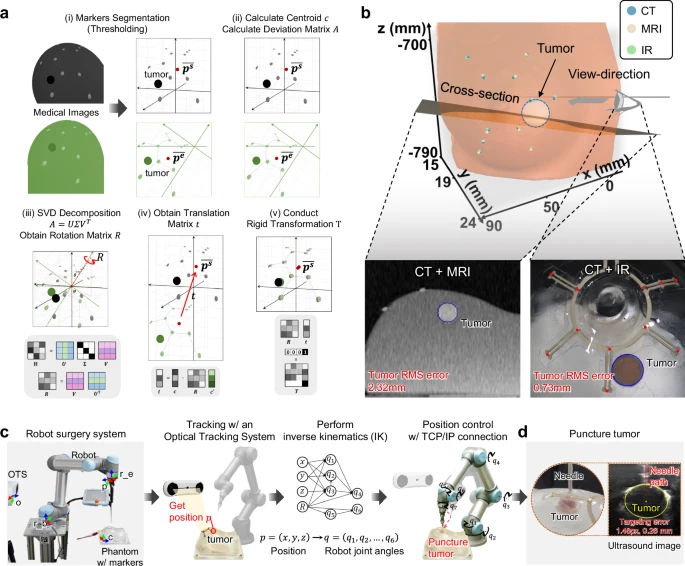
图 4 | 使用成像标记物的多模态图像配准与机器人辅助肿瘤穿刺。
a 使用该器件的多模态图像配准流程示意图。通过基于标记物的坐标变换,将肿瘤位置在 CT、MRI 和红外模态之间进行映射。
b CT 与 MRI/红外模态之间的肿瘤配准。上方:基于标记物的三维空间对齐。左下方:CT 与 MRI 的横截面融合图像,以及 CT 与 MRI 之间的均方根误差。右下方:乳房体模的俯视图,以及 CT 与红外之间的均方根误差。
c 机器人辅助肿瘤穿刺流程。将机械臂与光学追踪系统及多模态成像标记物进行集成。
d 用于验证穿刺准确性的术后超声图像。
这项技术的意义,远不止于“又一款柔性电子器件”。它解决的是多模态医学影像融合领域最基础、也最顽固的工程问题——参考标记物的模态兼容性。
对产业而言,它意味着:
· 简化手术流程:外科医生无需在术前反复确认不同标记物的对应关系,也无需因标记物位移而中断手术。
· 提升机器人手术的“智能感”:手术机器人若能直接“读懂”贴在皮肤上的CT/MRI/光学“三合一”标记,将真正实现从“被动跟随”到“主动规划”的跨越。
· 拓展适应症:目前验证的是乳房手术,但设计思路可轻易迁移至脊柱、颅脑、膝关节等对多模态影像融合有刚需的领域。
商业化的距离:尽管原理验证令人振奋,但距离手术室应用仍有几步之遥。研究团队坦诚指出了当前局限:器件目前针对乳房曲面优化,面对更复杂的三维体表(如面部、关节)需要调整几何结构;系统级校准在每次手术前仍需快速重做;此外,供电方式目前采用临时夹片,临床化需集成微型电池或无线供电。
每一项优雅的技术演示,都意味着更复杂的临床转化挑战。
本研究最值得称道之处,在于用成熟的材料工程和微纳制造手段,系统性地回答了“如何让一个贴片同时被CT、MRI和红外相机看见”这一具体问题。但我们也应看到:
1. 生物相容性与长期粘附:PEIE处理的Silbione在猪皮上表现良好,但人体皮肤油脂、汗液、消毒剂对粘附力的影响尚待长期验证。
2. 成本与可消毒性:集成了μLED、柔性电路和多种复合材料,其制造成本是否能降至可一次性使用的水平?器件表面能否耐受手术室常规消毒?
3. 真实解剖动态补偿:体模实验中的肿瘤是静止的。在真实手术中,呼吸、心脏搏动、组织牵拉都会改变标记物与靶点的相对位置。系统能否实时补偿这些动态变化,将是下一步必须攻克的难题。
尽管如此,这项研究依然为“可穿戴式手术导航”开辟了一条清晰的路径。当标记物不再是被动的“点”,而是能感知、能通信、能与多模态影像“对话”的智能界面时,微创手术的精度边界,或许将再次被改写。
Kim, K.Y., Ryu, J., Kang, J. et al. A conformable multimodal imaging marker for surgical navigation systems. npj Flex Electron 10, 24 (2026). https://doi.org/10.1038/s41528-025-00525-1
END
撰文 | 郝娅婷
排版 | 周宇茜
审核 | 医工学人理事会
扫码加入医工学人,进入综合及细分领域群聊,
参与线上线下交流活动

推荐阅读
点击关注医工学人 直播预告

本篇文章来源于微信公众号: 医工学人
