






星标“医工学人”,第一时间获取医工交叉领域新闻动态~

2025年8月23日,清华大学联合解放军空军特色医学中心与解放军总医院在《Nature Communications》在线发表了题为“迈向专家级的自主颈动脉超声扫描——大规模学习驱动的机器人系统”(Towards expert-level autonomous carotid ultrasonography with large-scale learning-based robotic system)的研究论文,研发了基于大规模深度学习驱动的自主颈动脉超声机器人系统,实现了从影像获取到斑块诊断分析的全自主超声检查,并在科研临床验证中展现出与专家一致的性能,对于推动超声检查范式的智能化变革具有重要意义。
医学超声作为临床应用最广泛的影像学检查技术,在中国年检查人次超过20亿,位居各类影像诊断方式之首。然而,与X光不同,超声成像需依靠医生手持探头实时调整角度,以捕捉特定切面的动态图像。该操作高度依赖操作者的手法经验,导致医学超声面临着标准化程度低,结果可重复性差及医生资源短缺的严峻挑战。目前,AI技术在超声影像分析诊断方面的显著进展,为将智能化延伸至上游的影像采集环节奠定了坚实基础。如何进一步发展智能自主扫查技术,已成为解锁超声检查全面自动化的关键课题。在人均医疗资源相对有限的现实背景下,发展智能自主超声机器人,不仅能有效缓解超声医师资源短缺的压力,更能提升检查的标准化程度及结果一致性,对推动高质量医疗服务的普惠化具有重要社会意义。
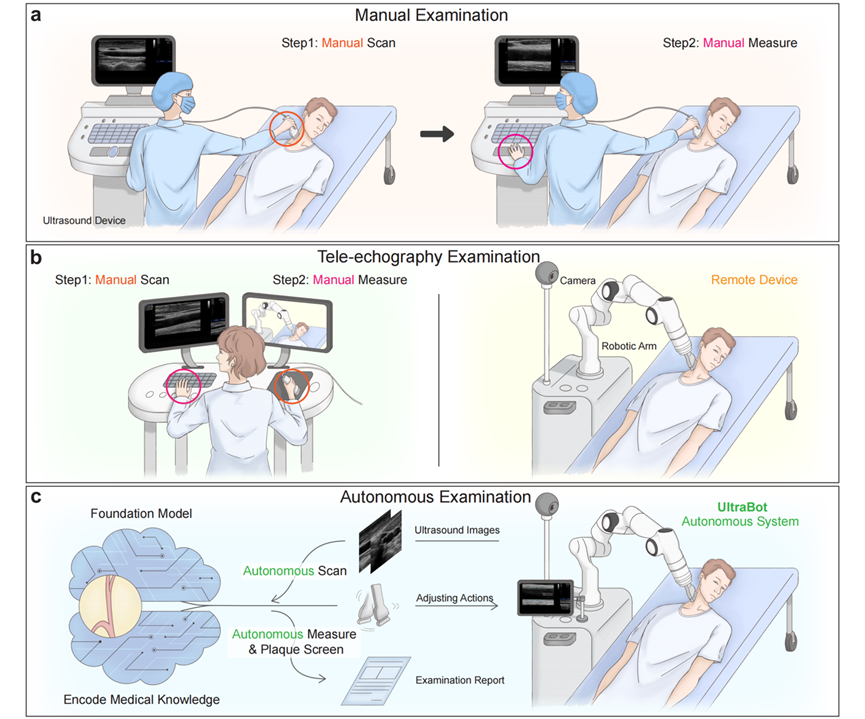
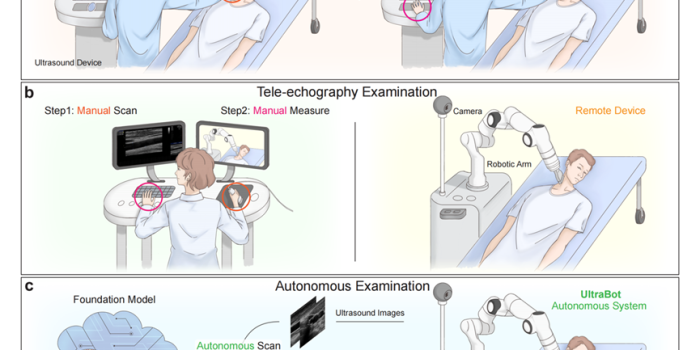
图 1. 三种超声范式对比(a)人工超声检查(b)人工远程超声检查(c)全自主超声检查
近年来,随着GPT等大型语言模型与多模态基础模型的兴起,神经网络的 scaling law得到了充分验证:随着数据规模的扩大、模型参数量的增加以及学习算法的改进,模型会涌现出前所未有的能力——例如处理复杂样本的能力,以及对未见案例的零样本泛化能力。受此启发,本文探索了大规模数据驱动的范式在自主超声检查中的潜力。具体而言,本文通过以下四项核心贡献:
(1) 构建统一模仿学习框架,学习血管解剖学知识与扫查操作技巧(图3c-System Flexibility);
(2) 建立大规模专家示教数据集(247,000+样本,规模较前人提升100倍),提供多样化人群数据,为强泛化性提供数据基础(图3c-Data Scalability);
(3) 制定标准化扫查规范,确保覆盖临床测量与测量所需的解剖结构(图3c-Medical Examination Completeness);
(4)设计临床导向验证方案,从多维度验证超声机器人的泛化能力(图3c-Clinically-oriented Evaluation)
——证明了大规模数据驱动的超声机器人具有强大的泛化能力,且能达到专家级的精度。
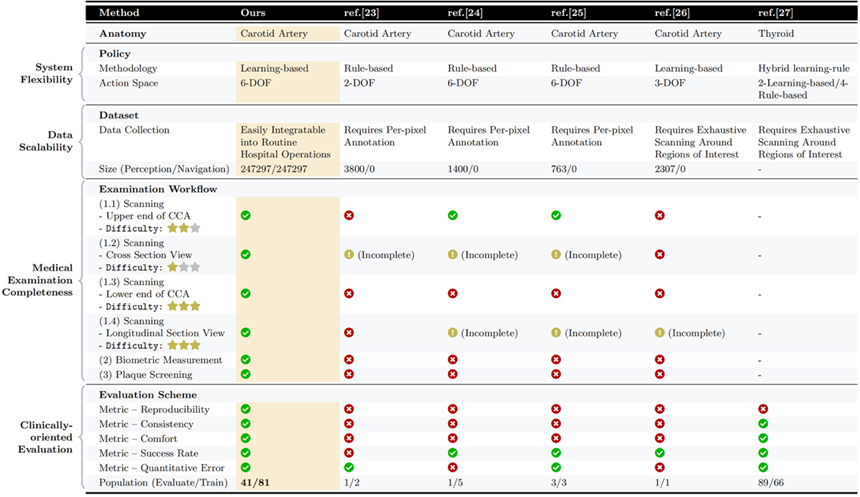
图 3 本文四个核心贡献维度
本文核心是将自主扫查建模为一个端到端的视觉驱动导航任务:通过实时超声图像直接输出探头的调整动作策略,以获取高质量诊断图像。具体而言,本文将感知模块与动作决策模块整合到同一网络中,并通过深度模仿学习策略进行同时优化(图4)。该网络通过统一学习策略实现六自由度探头位姿控制,相比现有工作实现了更简洁高效的系统架构。
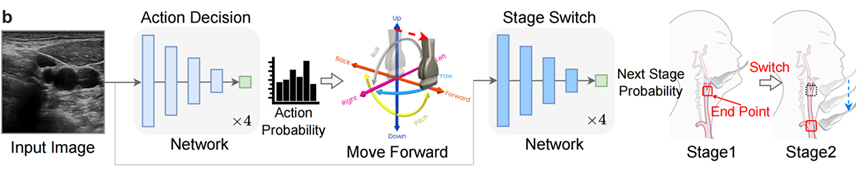
图 4 端到端视觉驱动导航模型
在数据层面,本文采用从大规模数据中学习通用化扫查策略。为此,本文收集了首个大规模颈动脉扫查专家示教数据集,包含247,297对超声图像与对应调整动作,涵盖真实场景中可能遇到的多种组织结构变异及专家的自适应调整策略(图5d)。该数据集规模较现有研究提升100倍,且该类数据天然存在于常规超声检查流程中,其可获取性为未来持续扩展数据集奠定了坚实基础。
基于上述高效建模方式与大规模数据驱动的的学习范式,机器人系统实现了全面的颈动脉扫查,覆盖临床诊断评估所需的全部解剖结构(图5a)。而现有研究受限于基于规则的策略、自由度不足与小规模数据集,难以实现全面扫描。更重要的是,本文实现了集扫描、测量与斑块筛查于一体的全自主工作流程,突破了现有工作仅聚焦单一环节的局限,为构建具备临床可用性的全自主超声机器人系统奠定了基础。
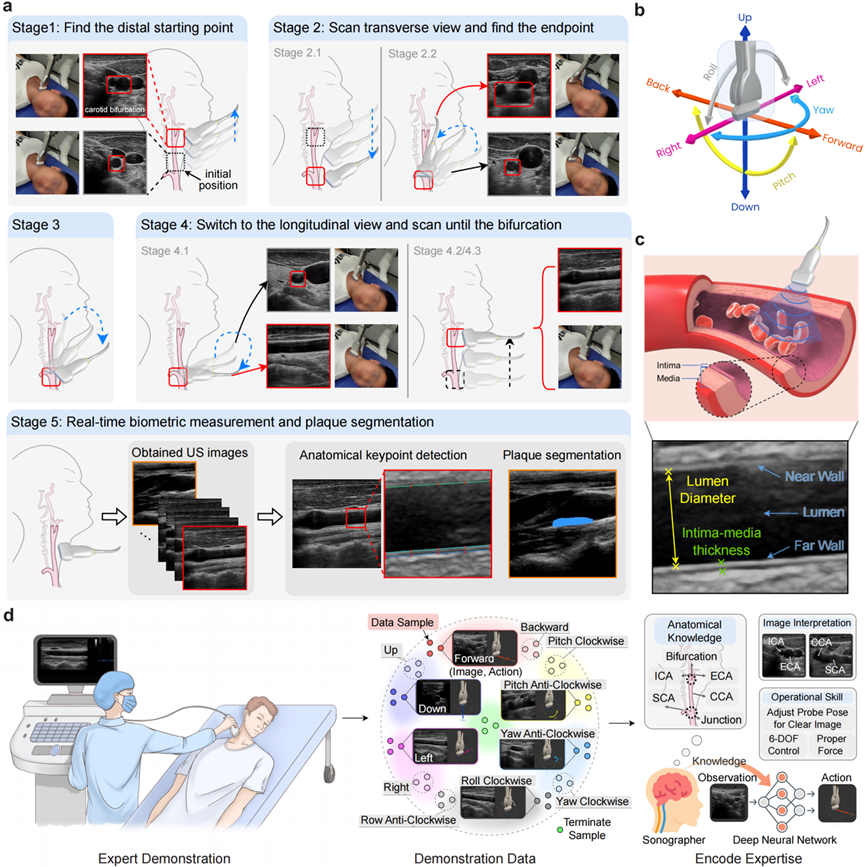
图 5 全自主超声机器人工作流(a)标准化扫查流程(b)探头六自由度示意图(c)颈动脉结构参数示意图(d)专家示教数据集
在验证方面,本文采用临床导向的评估方案,并将验证人群规模较现有研究提升 10 倍。该验证方案旨在反应自主超声机器人的在临床场景下的实际应用潜力。具体而言,机器人系统在多样化人群(年龄:19-70岁;体重指数:16.5-30.8;性别:男女均有)中实现超过90%的扫描成功率(图6c),证实其能有效应对不同解剖结构变异(包括成功扫描存在斑块的患者)。同时系统对于多种扰动因素(年龄、BMI、设备、成像参数)表现出足够的鲁棒性(图6d)。而现有颈动脉研究受限于验证规模(仅1-3名受试者),难以证明其临床可行性。
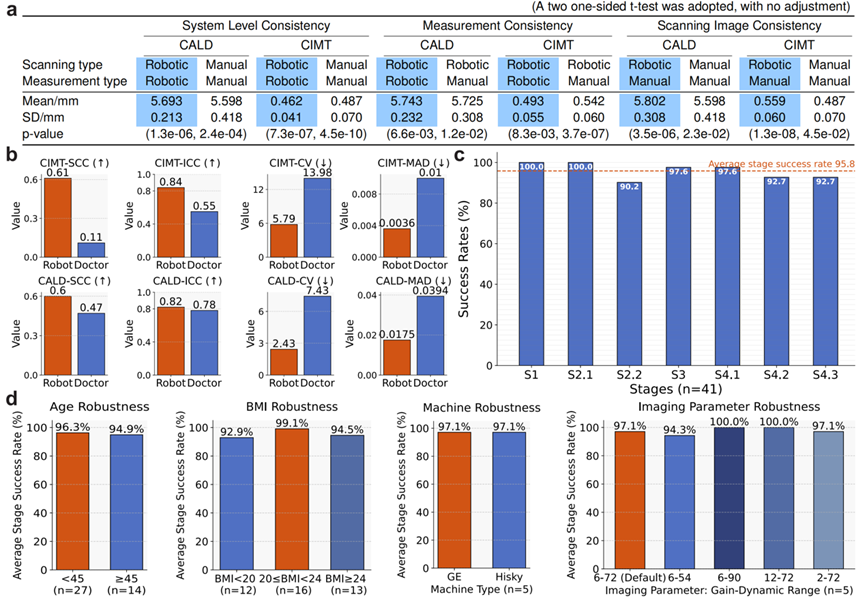
图 6 临床导向验证(a)机器人系统与高年资超声医师结果一致性对比(b)结果可重复性对比(c)自主影像获取成功率(d)鲁棒性
本文进一步证明了机器人系统对颈动脉健康关键指标(即内膜中层厚度与管腔直径)的精确测量能力。假设检验显示机器人系统的生物计量结果与专家测量高度一致(图6a)。特别值得关注的是,本文首次验证了机器人超声系统在生物计量中的可重复性——其四项可重复性指标均显著提升(最高达5.5倍),这一突破克服了传统人工扫描技术的根本局限(图6b)。此外,系统还展现出自动化斑块精确分割能力,在真实患者数据与专家标注数据集上均表现优异,实现了病理病例检测功能(图7)。
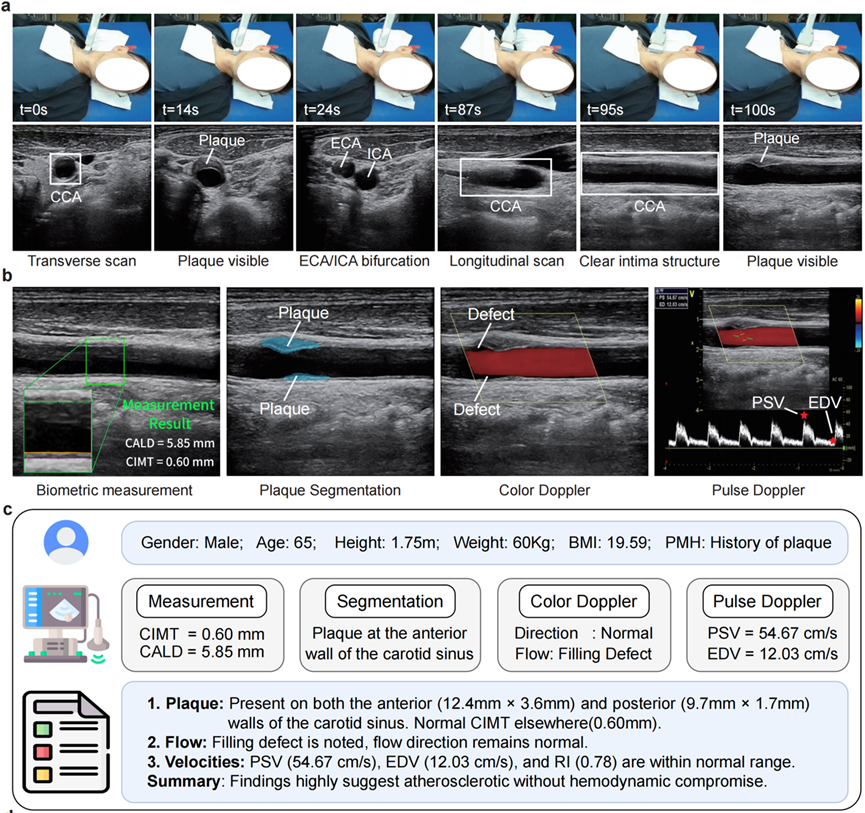
图 7 全自主超声检查可视化(a)自主影像获取(b)自主结构参数测量、斑块分割与血流动力学评估(c)结构化超声检查报告
总体而言,本实证研究证明了基于大规模学习的机器人系统在临床应用中的巨大潜力,标志着AI驱动的医疗超声机器人发展迎来了重要转折点。
文章作者介绍
清华大学自动化系博士生蒋昊峻、赵启晨,解放军空军特色医学中心杨倩副主任为该文的共同第一作者,清华大学自动化系黄高副教授与解放军总医院何昆仑教授为通讯作者。
审稿人评价
“The paper is very interesting, comprehensive, and will be very helpful as a basis for further research in ultrasound robotics.”
【Reference】
Jiang, H., Zhao, A., Yang, Q. et al. Towards expert-level autonomous carotid ultrasonography with large-scale learning-based robotic system. Nat Commun 16, 7893 (2025). https://doi.org/10.1038/s41467-025-62865-w
【Paper Link】https://www.nature.com/articles/s41467-025-62865-w
【Code Link】https://github.com/LeapLabTHU/UltraBot
【Demo Link】https://www.nature.com/articles/s41467-025-62865-w#additional-information:~:text=First%20Demonstration%20of,with%20Plaque%20Video
END
供稿 | 蒋昊峻
排版 | 王可豪
审核 | 医工学人理事会
扫码加入医工学人,进入综合及细分领域群聊,
参与线上线下交流活动

推荐阅读
点击关注医工学人
最新直播

本篇文章来源于微信公众号: 医工学人
