






星标“医工学人”,第一时间获取医工交叉领域新闻动态~

当外科医生面对深藏在大脑或肺部等复杂器官中的肿瘤时,他们常常面临一个残酷的抉择:要么进行高风险的开放式手术,要么接受传统微创工具“走直线”的局限性。然而,一场源自全球顶尖实验室的技术革命,正让这种两难处境成为历史。根据《Science Robotics》的一篇最新综述,新一代的微型机器人正像拥有自主意识的“机器蛇”一样,以我们前所未见的方式在人体内蜿蜒前行。
文章系统地回顾了用于微创介入治疗的机器人技术的最新进展,特别是聚焦于可控柔性针(steerable needles)和连续体机器人(continuum robots)的发展与应用,同时也是技术的核心。这根超细的针由多层可伸缩、可旋转的同心管构成,或者其尖端可通过磁场在体外精确操控。它们不再是僵硬的金属杆,而是灵活的探索者,能够巧妙地绕过神经、血管和重要器官,沿着一条最优的弯曲路径,直达病灶。此外,真正的颠覆性力量是来自于驱动这些“机器蛇”的大脑——人工智能。
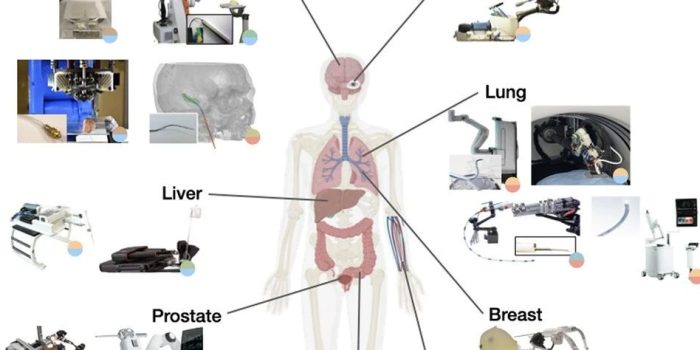
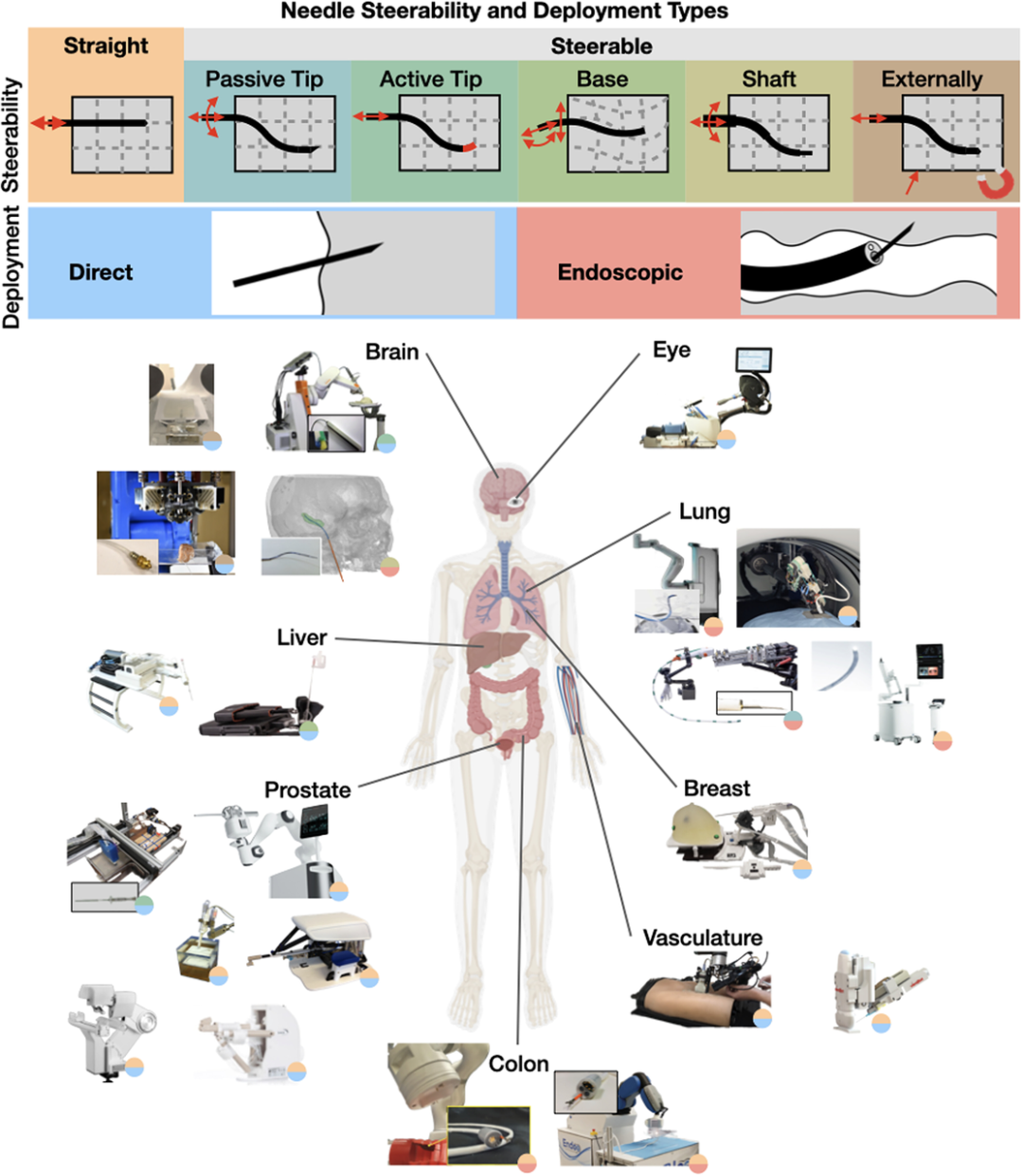
多技术融合:该领域正经历一场由机械创新、先进成像技术和人工智能算法深度融合驱动的革命。机器人系统不再是简单的机械臂,而是集成了复杂传感、智能规划和精准控制于一体的智能平台。 突破直线限制:核心进展体现在器械设计上,如同心管机器人、磁控机器人和具有主动尖端的器械,它们能够沿着弯曲路径在体内穿行,从而避开重要的器官和组织。 AI赋能:人工智能,特别是深度学习,正在从多方面赋能该技术。它不仅被用于从MRI、CT或超声图像中自动分割和识别解剖结构与器械,还被用于创建能够应对呼吸等生理运动的动态路径规划算法(图1)。 迈向自主化:研究趋势正从纯粹的医生遥控操作,转向人机协作乃至半自主和全自主操作。系统开始扮演“AI副驾驶”的角色,能够自主执行如血管穿刺或病灶活检等任务,以期达到超越人类的精度和稳定性。 图1:医疗穿刺机器人的人工智能引导组件。基于穿刺手术的人工智能引导组件及其各组成部分的关键特性(上图)。每个组件的AI引导程度可根据医生所需投入的精力进行调整。各AI引导组件均可独立实现不同级别的引导支持(下图)。 该技术主要解决了传统微创手术中的一个核心难题:如何安全、精准地抵达体内深部或被关键组织遮挡的病灶。传统的刚性穿刺针和内窥镜受限于“直线路径”,在执行如脑部深层肿瘤活检、肺部周围型肺结节穿刺或复杂血管介入等任务时,往往会增加对健康组织的附带损害风险,甚至在某些情况下无法实施。这些新型机器人技术通过实现弯曲路径的精准导航,极大地扩展了微创手术的适用范围和安全性(图2)。 图2:穿刺机器人可根据导向类型和部署方式分类。顶部示意图中,黑色代表穿刺针,灰色代表组织,红色代表进入组织后的可控元件。下方我们按解剖学应用场景对穿刺机器人进行分类,并通过图标上半部分的导向类型(主动导向/被动导向)和下半部分的部署方式(手动/自动)加以区分。 该技术核心创新在于其系统性的整合范式。单一的技术突破(如一种新材料或算法)固然重要,但真正的创新在于将器械工程学(可控针/导管)、医学影像学(实时引导)、计算机科学(运动规划与AI)和控制论(人机交互与自主控制)无缝集成到一个闭环系统中。这种跨学科的融合,催生了能够感知、思考、规划并行动的“智能介入系统”,它们不仅是医生手的延伸,更是医生智慧的增强,预示着一个更精准、更微创、更智能的医疗新时代的到来。 [1] Ron Alterovitz et al. ,Medical needles in the hands of AI: Advancing toward autonomous robotic navigation.Sci. Robot.10,eadt1874(2025).DOI:10.1126/scirobotics.adt1874 END 编辑 | 郝娅婷 排版 | 张艳青 审核 | 医工学人理事会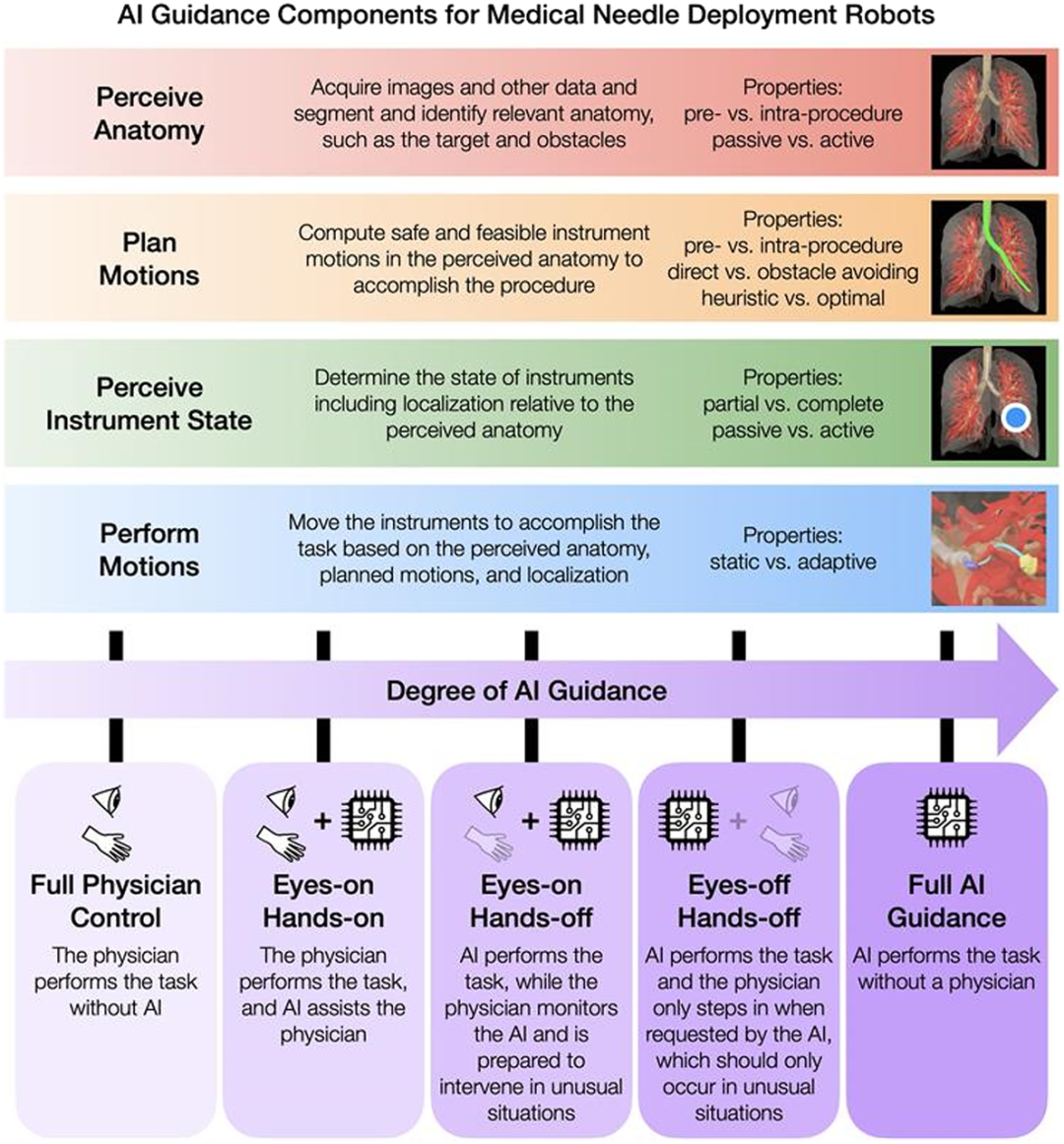
扫码加入医工学人,进入综合及细分领域群聊,
参与线上线下交流活动

推荐阅读
基于多模态生理传感的中风风险预测:智能穿戴技术的创新路径——从连续监测到早期预警的学术探索
医工简报 | 预算内的灵感:低成本系统在实验室外收集脑部数据;肝细胞癌中的细胞图谱分析:预测局部复发并识别空间关系生物标志物
点击关注医工学人
最新直播

本篇文章来源于微信公众号: 医工学人
