






星标“医工学人”,第一时间获取医工交叉领域新闻动态~

在医疗科技的广阔天地中,微型机器人正逐步崭露头角,其在精准医疗领域的应用潜力令人瞩目,例如靶向药物输送和微创手术等。然而,这些微小却复杂的机器人在实际操作中面临着巨大的挑战,包括复杂的动力学、难以复制的微尺度感知能力,以及对无线驱动系统(如超声波)的依赖,使得其精确控制难上加难。传统的控制方法往往力不从心,而强化学习(RL)虽能赋予机器人学习和适应环境的能力,但在微型机器人领域,其对海量训练数据的需求、缓慢的收敛速度以及在新环境中的泛化能力不足等问题,严重阻碍了其实际应用。
01
模型基强化学习(MBRL):破解微型机器人控制难题
02
AI如何操控微型机器人?
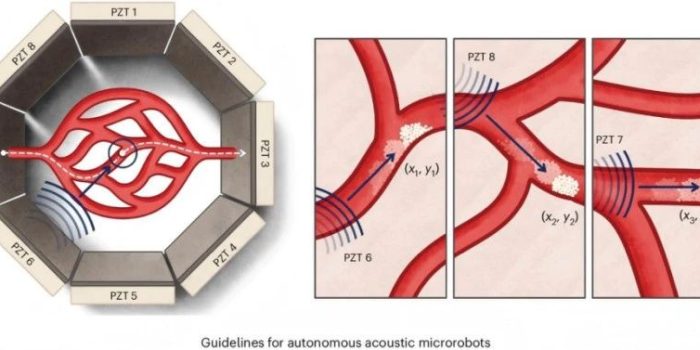
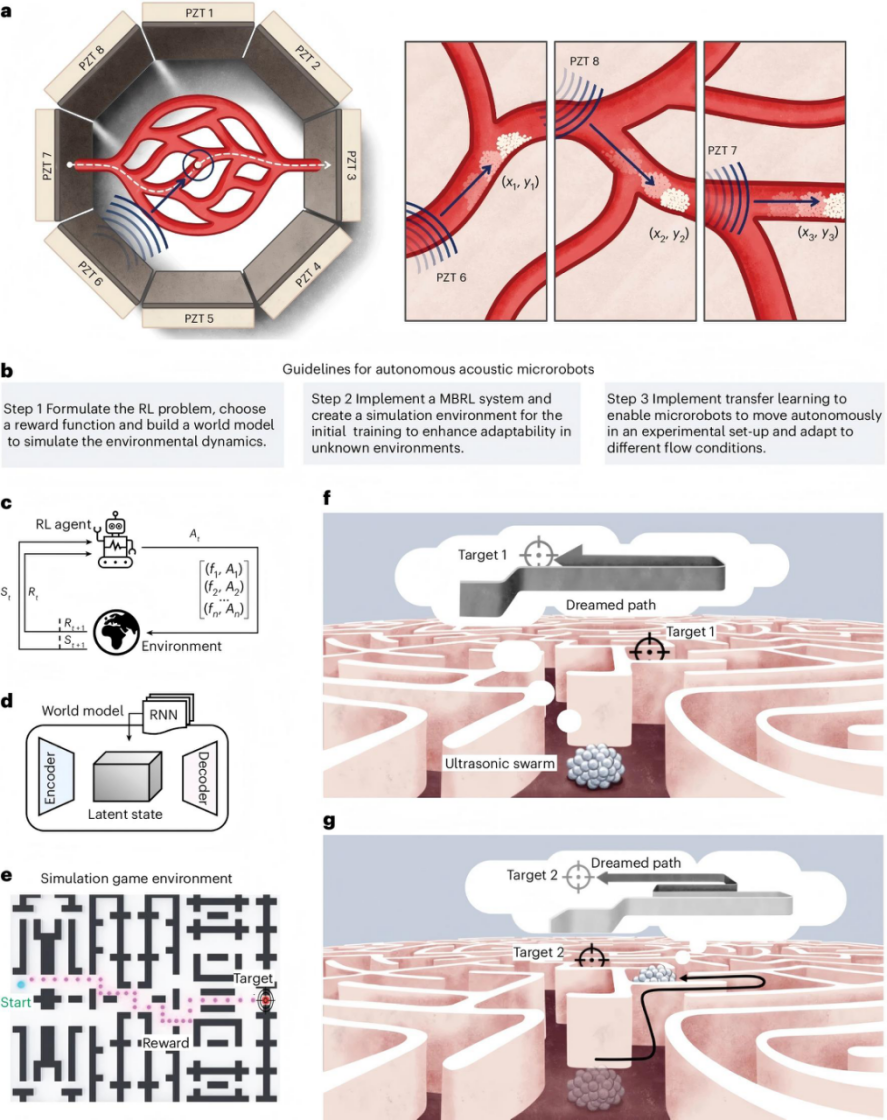
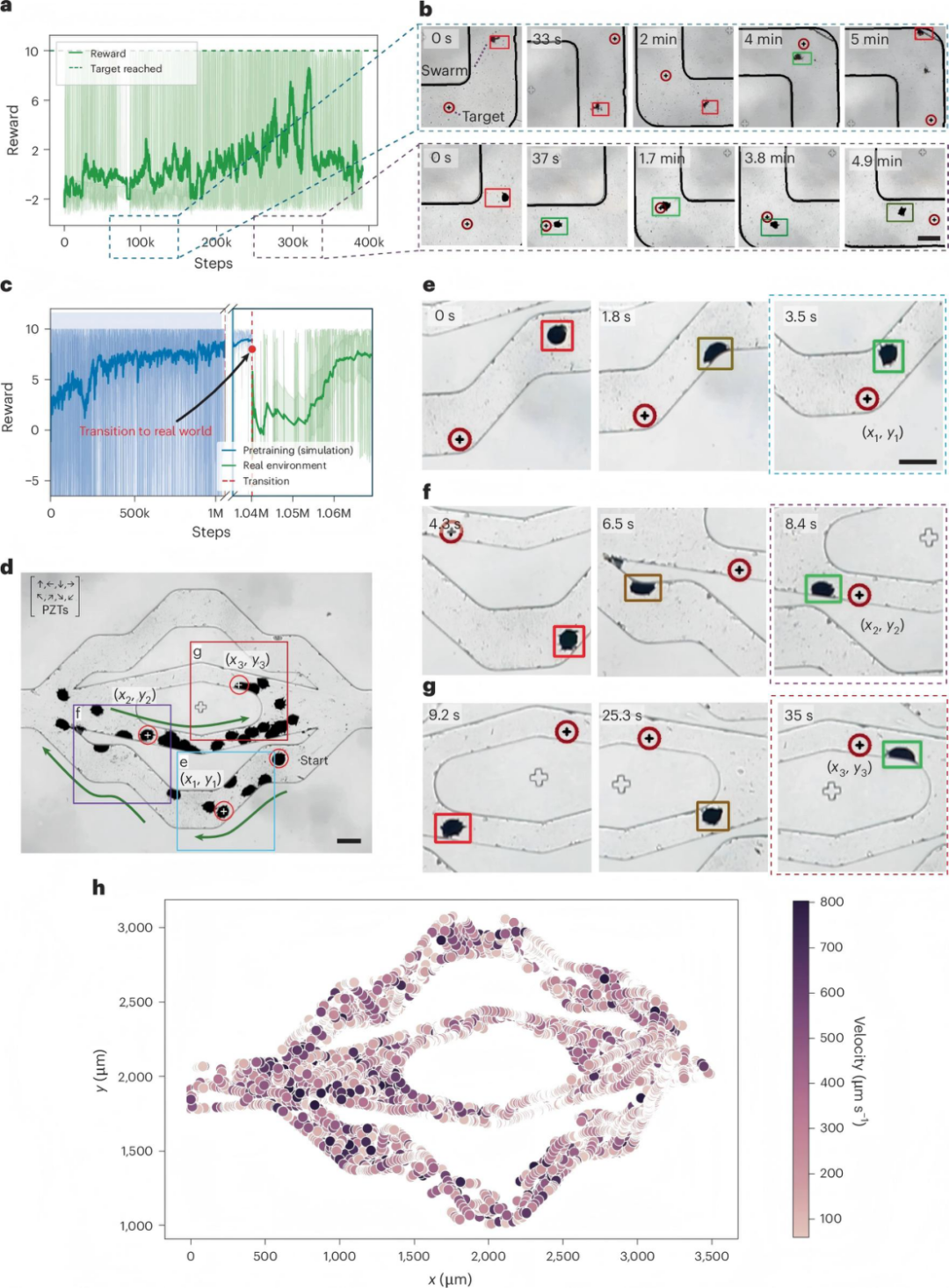
该研究团队设计了一个巧妙的实验设置:一个八边形排列的压电换能器(PZT)环绕着一个人工血管通道。微型机器人由2-5微米直径的生物兼容性微气泡在超声场中自组织形成。通过精确控制PZT的激活与去激活,结合毫秒级的快速切换,研究人员能够利用声压梯度驱动微型机器人在通道内精准移动。
03
卓越性能:仿真到现实的飞跃
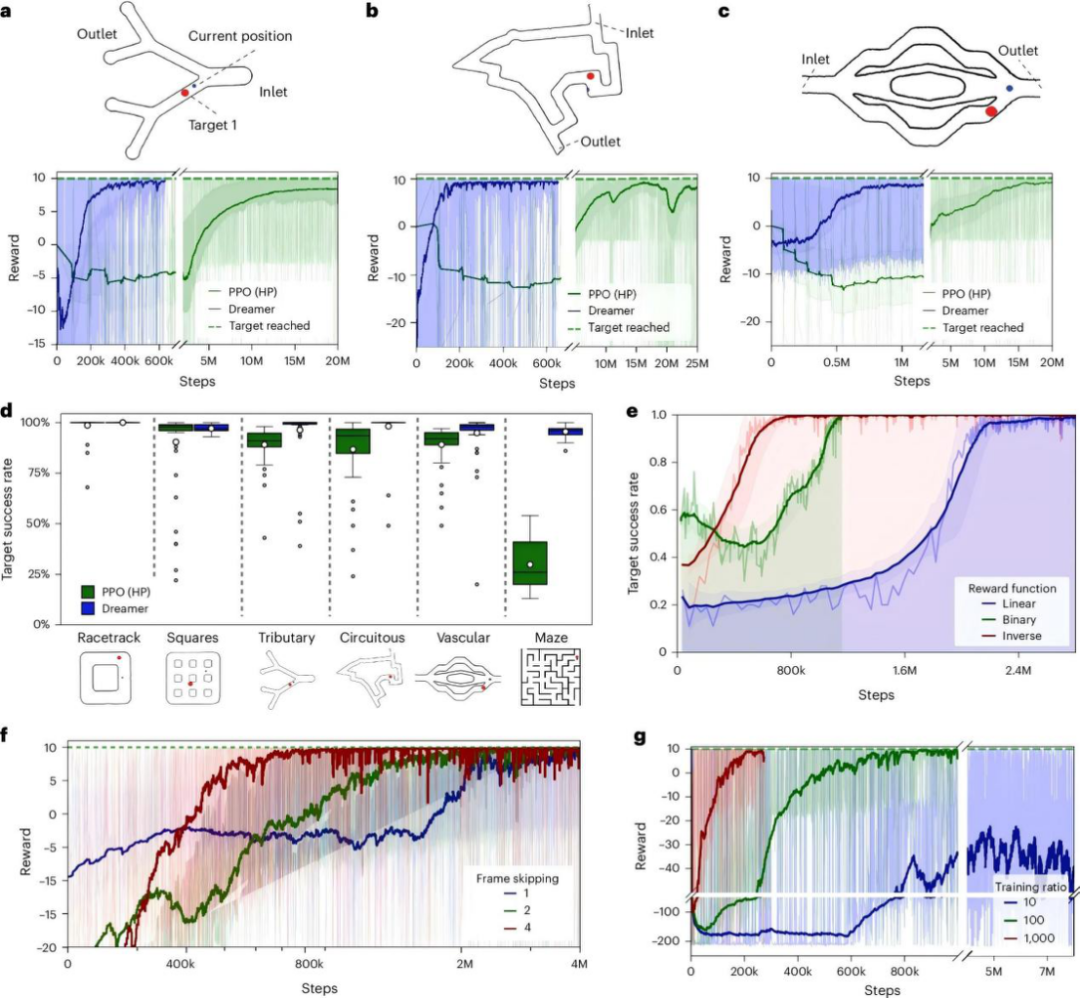
MBRL的优势在实验中得到了充分体现。与最先进的无模型强化学习算法PPO相比,MBRL在各种复杂通道(如分支通道、迂回通道和血管通道)中表现出更快的收敛速度和更高的目标导航成功率。例如,在简单的多输出分支通道中,MBRL比PPO快约50倍达到收敛。在复杂的血管通道中,MBRL仅需100万步即可收敛,而PPO则需要约2500万步。
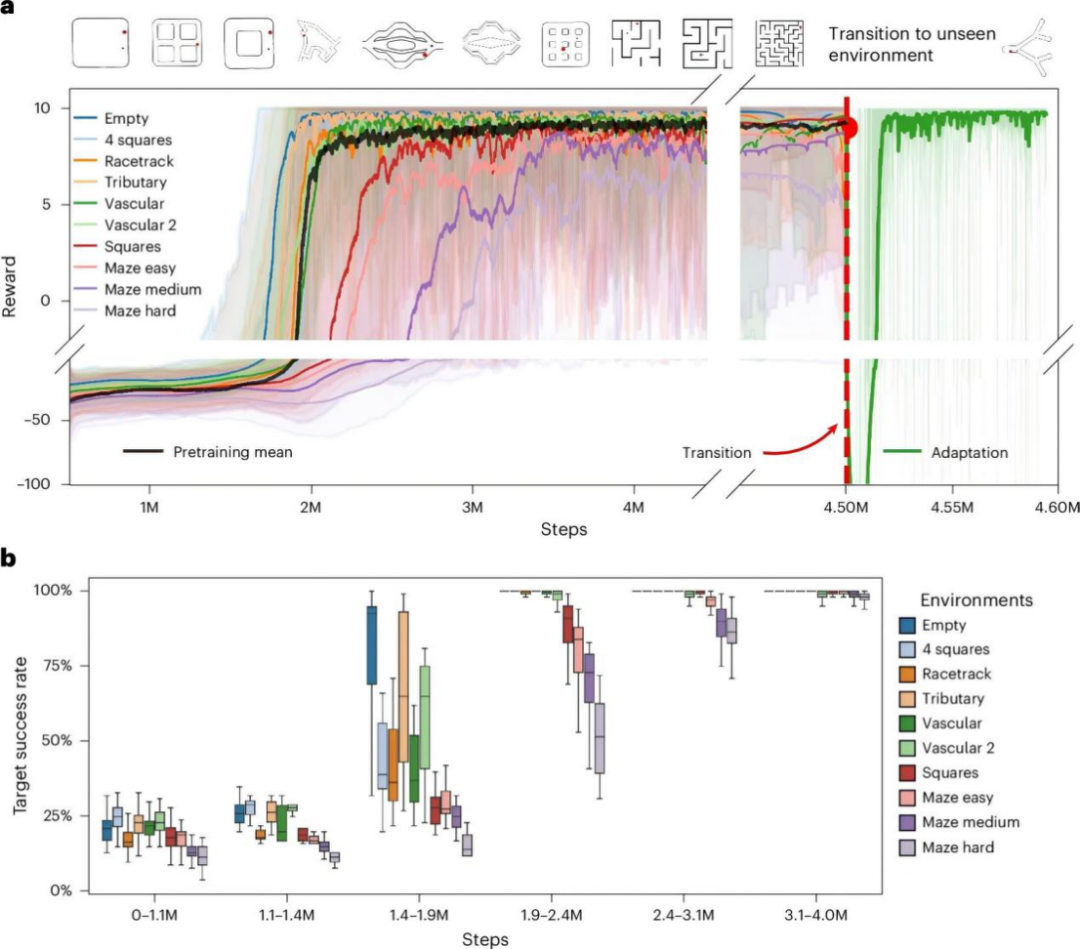
更令人兴奋的是,经过仿真环境预训练的模型在实际物理实验中展现出了卓越的泛化能力和适应性。即使在之前从未见过的新通道中,模型也能在短短30分钟的微调后,将成功率从50%提升至90%以上。这表明AI驱动的超声微型机器人有望在真实的复杂生物环境中进行实时操作,例如在复杂的血管系统中进行药物递送或诊断。
04
未来展望
这项研究为超声驱动微型机器人的自主控制开辟了新的道路,展示了AI在革新生物医学应用中微型机器人技术的巨大潜力。随着技术的不断成熟,我们有理由相信,这些AI控制的超声微型机器人将在疾病诊断、靶向治疗、微创手术等领域发挥关键作用,为人类健康带来革命性的突破。
▼参考资料
Medany, M., Piglia, L., Achenbach, L. et al. Model-based reinforcement learning for ultrasound-driven autonomous microrobots. Nat Mach Intell (2025). https://doi.org/10.1038/s42256-025-01054-2
END
撰文 | 刘瑄伦
编辑 | 周宇茜
审核 | 医工学人理事会
扫码加入医工学人,进入综合及细分领域群聊,参与线上线下交流活动

推荐阅读
点击关注医工学人
最新直播


本篇文章来源于微信公众号: 医工学人
