







6.30
医工学人The Innovators
1.Nature BME | 用于读取高频大脑信号的外周神经接口;
2. Nature Electronics | 使用集成的智能胶囊对胃肠道进行连续生化分析;
3.Nature machine intelligence | 超声驱动的自主微型机器人的基于模型的强化学习;
4. NeuroImage | 头部 CT 扫描颅内和脑室体积的年龄和性别特异性标准曲线;
5. Science Robotics | OpenExo:一种开源模块化外骨骼,可增强人体功能;
6.Science Advances | 用于协作人机界面的柔性多通道肌肉阻抗传感器;
7. Nature Reviews materials | 医用微型机器人中的材料协同集成,用于高级成像和驱动;
医工简报音频内容已在喜马拉雅、小宇宙等平台上线,欢迎订阅收听~

行业动态
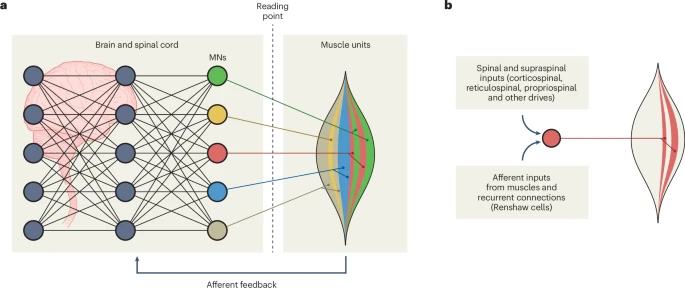
来自中枢神经系统 (CNS) 的准确和稳健的记录和解码对于人机接口的进步至关重要。直接测量 CNS 活性的技术受到其分辨率、对干扰的敏感性和侵入性的限制。运动神经元 (MN) 代表 CNS 的运动输出层,接收和采样来自神经系统不同区域的信号,并生成控制肌肉的神经命令。肌肉记录和深度学习可以实时、高精度地解码脊柱 MN 的尖峰活动。MN 的输入信号可以从 MN 输出中估计出来。该研究认为使用肌肉传感器的外周神经接口代表了一种有前途的非侵入性方法,可以估计来自 CNS 的一些神经活动,这些活动到达 MNs,但不直接调节力的产生。我们讨论了支持这一概念的证据,以及在受控和真实环境中整合和测试基于 MN 的 CNS 接口所需的进展。
https://www.nature.com/articles/s41551-025-01445-1
临床综合
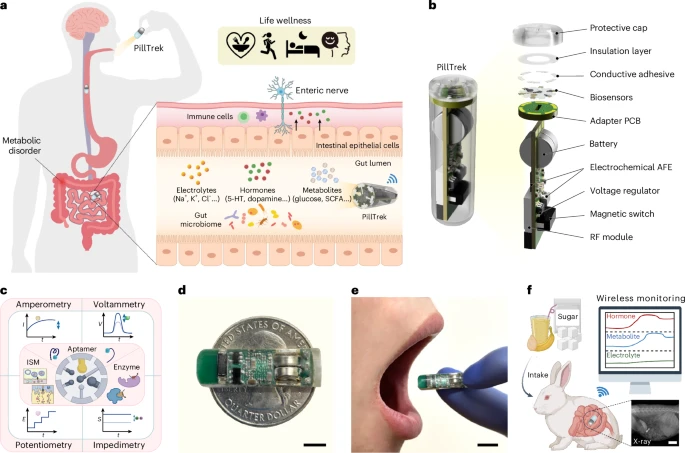
胃肠道包含丰富的化学信息,可用于破译消化系统和神经系统的健康状况。传统的分析方法,如粪便分析和活检,是侵入性的、昂贵的,并且无法提供整个胃肠道的实时代谢和激素分析。已经开发了商用可摄入胶囊传感器,但仅监测基本标志物,例如 pH 值和压力,而忽略了详细的化学分析。该研究报告了一种集成的智能胶囊,它可以同时检测一系列生化标志物,包括电解质、代谢物和激素。该胶囊被称为 PillTrek,直径为 7 毫米,长度为 25 毫米,并装有一个小型化无线电化学工作站,能够执行一系列电化学测量技术(电位法、安培法、伏安法和阻抗法),使其能够与各种电化学传感器连接并检测肠道中的各种参数。使用一系列传感器(血清素、葡萄糖、pH、离子强度和温度),我们说明了该系统在涉及大鼠和兔子模型的动物研究中体外和体内的能力,监测这些关键生物标志物的动态特征及其对不同饮食摄入量的反应。
https://www.nature.com/articles/s41928-025-01407-0
医学人工智能
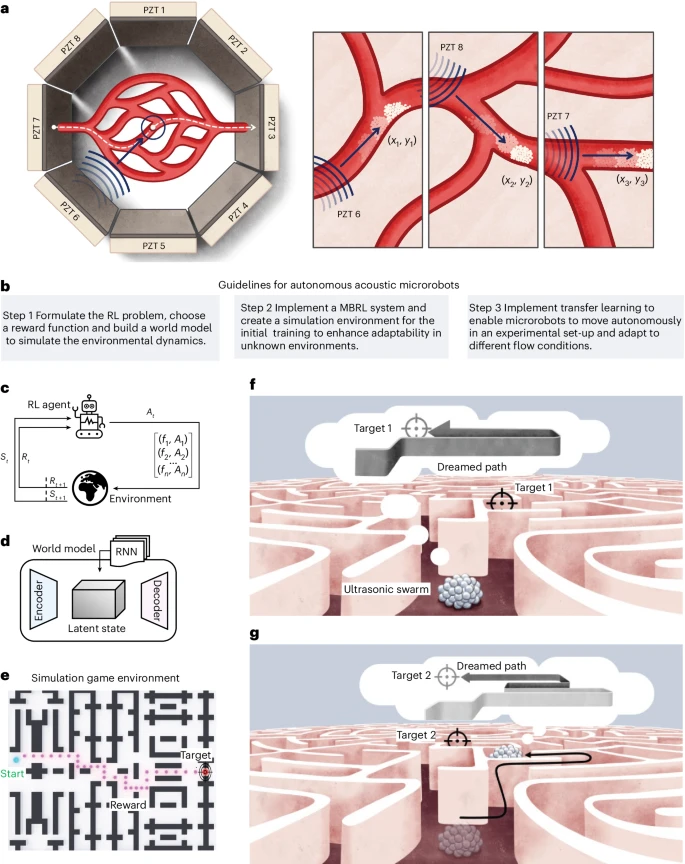
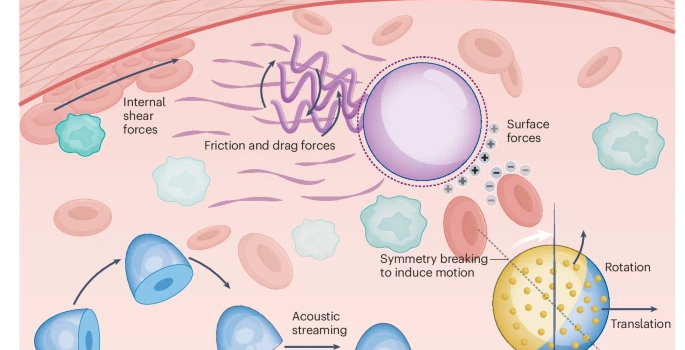
强化学习正在成为微型机器人控制的强大工具,因为它可以在传统控制方法无法满足的环境中实现自主导航。然而,由于需要大型训练数据集、物理系统的收敛速度慢以及跨环境的泛化性差,因此很难将强化学习应用于微机器人。这些挑战在超声驱动的微型机器人中被放大,这些机器人需要在高维动作空间中进行快速、精确的调整,而这对于人类作员来说通常太复杂了。应对这些挑战需要采样高效的算法,这些算法在管理复杂的物理交互的同时适应有限的数据。为了应对这些挑战,该研究实施了基于模型的强化学习,用于自主控制超声驱动的微型机器人,该微型机器人从反复出现的想象环境中学习。非侵入性 AI 控制微型机器人提供精确的推进,并在数据稀缺的环境中有效地从图像中学习。从预训练的仿真环境过渡后,我们实现了样本高效的碰撞避免和通道导航,在微调的一小时内,跨各种通道的目标导航成功率达到了 90%。此外,该模型最初在新环境中成功推广了 50% 的任务,经过 30 分钟的进一步训练,提高到 90% 以上。我们进一步展示了在静态和流动条件下对复杂脉管系统中微型机器人的实时作,从而强调了人工智能在生物医学应用中彻底改变微型机器人的潜力。
https://www.nature.com/articles/s42256-025-01054-2
医学成像技术
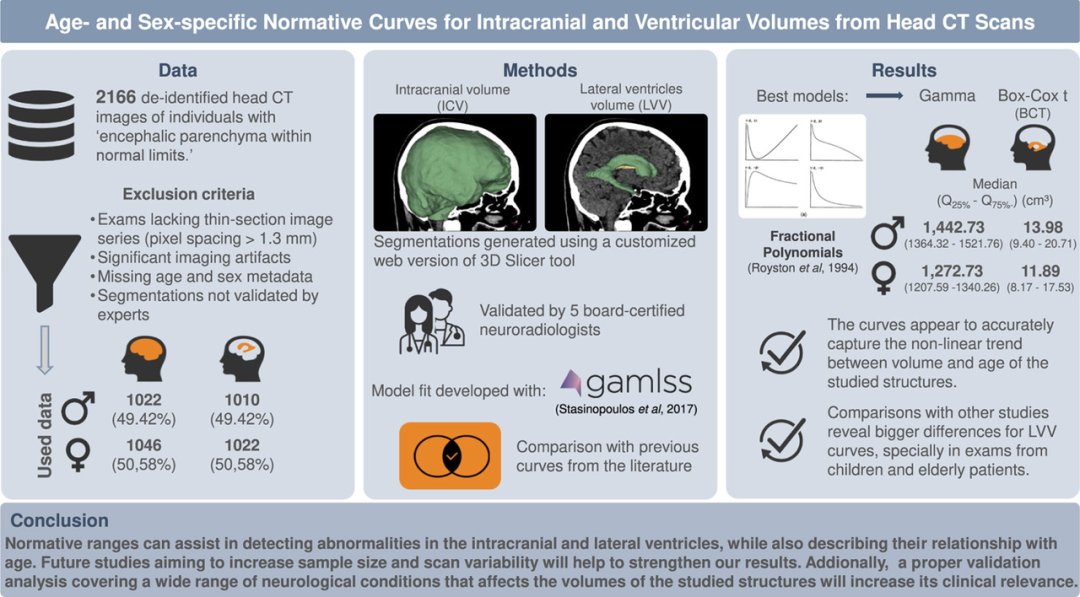
颅内容积(ICV)和侧脑室容积(LVV)是评估脑发育、衰老及神经疾病的关键指标,现有磁共振(MRI)基准数据丰富,但CT领域缺乏系统性规范。巴西Israelita Albert Einstein团队利用2153例“脑实质正常”的头CT扫描,首次建立了覆盖全生命周期(0-95岁)的ICV与LVV年龄-性别特异规范曲线。该研究所构建的脑图谱包含均值/中位数趋势及变异系数,与既有文献范围的对比揭示了部分差异。这些CT基准曲线可助力临床区分生理性改变与病理性异常(如脑积水、萎缩),尤其在MRI资源受限地区,为自动化分割工具的临床应用提供关键参照。
https://doi.org/10.1016/j.neuroimage.2025.121272
康复(神经)工程
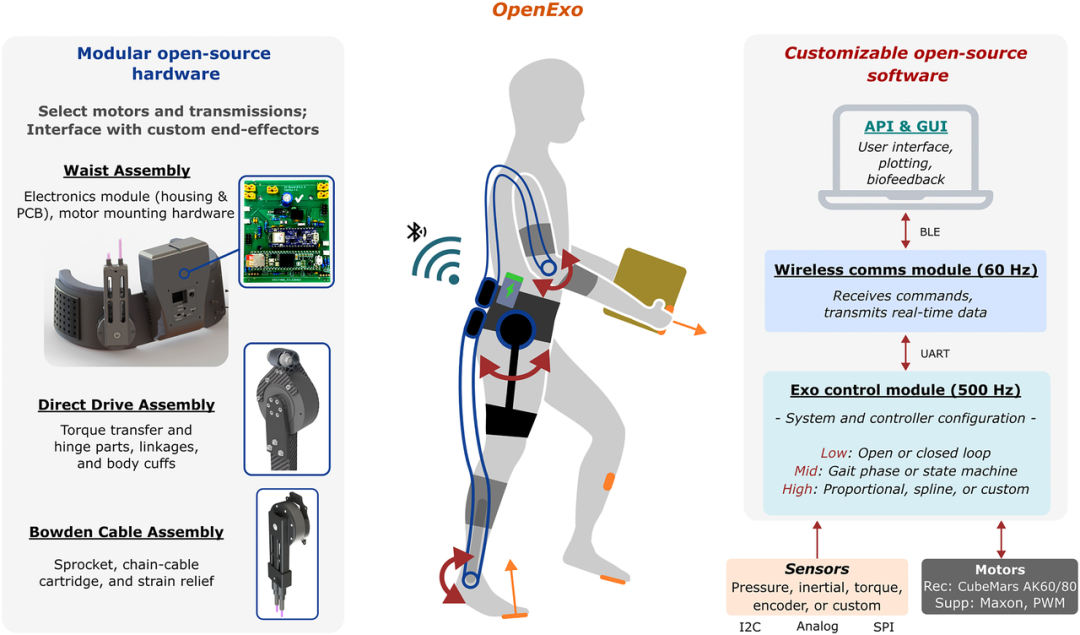
尽管可穿戴机器人外骨骼领域正在迅速扩大,但仍存在一些进入壁垒,使许多人不愿在该领域进行研究,最终阻碍了增长。其中最主要的是外骨骼从概念到实施的漫长且昂贵的开发过程,以及需要广泛的专业知识。此外,许多外骨骼是为特定用途而设计的,并且仅限于实验室环境,这限制了设计系统适应回答新问题和探索新领域的灵活性。为了解决这些障碍,研究者们提出了 OpenExo,这是一个开源的模块化无线外骨骼框架,可提供对设计过程所有方面的访问,包括软件、电子、硬件和控制方案。为了证明这种外骨骼框架的实用性,他们使用该系统在多种配置下进行了台式和实验验证测试,包括仅髋部的倾斜辅助、仅脚踝的室内和室外辅助、髋部和脚踝的负重辅助以及仅肘部的举重辅助。软件架构、电气元件、髋关节和鲍登电缆传输设计以及控制方案的所有方面都可供其他研究人员在寻求解决可穿戴外骨骼领域的研究问题时免费访问、使用和修改。文章作者希望 OpenExo 能够加速新外骨骼设计和控制方案的开发和测试,同时鼓励其他人,包括那些被拒之门外的人,探索新的和独特的研究问题。
https://www.science.org/doi/full/10.1126/scirobotics.adt1591
可穿戴技术
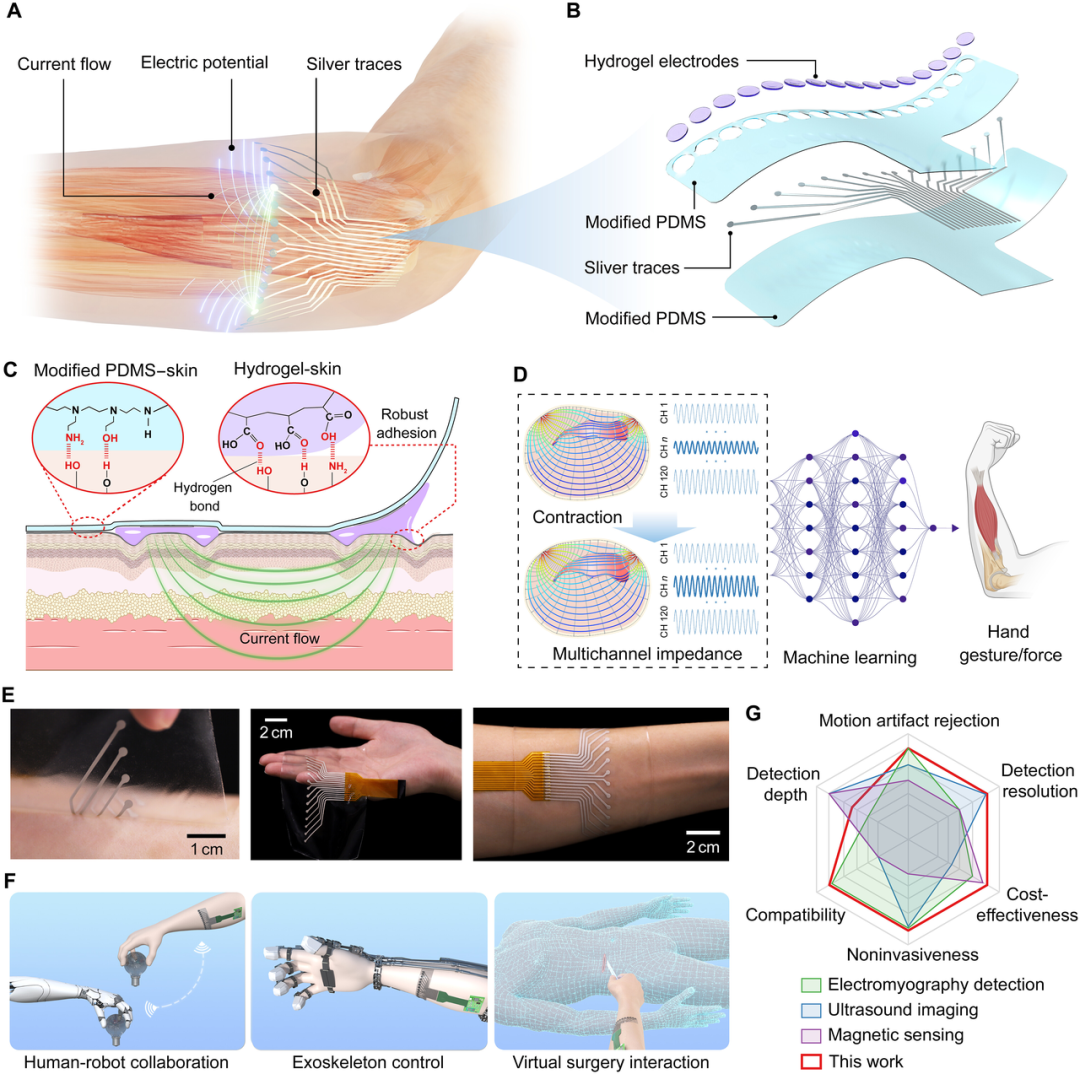
对高级人机界面 (HMI) 的需求凸显了准确测量肌肉收缩状态的需求。传统方法(如肌电图)无法测量被动肌肉收缩状态,而光学和超声技术由于其刚性换能器而遭受运动伪影的影响。为了克服这些限制,该研究开发了一种灵活的多通道电阻抗传感器 (FMEIS),用于无创检测骨骼肌收缩。通过施加难以察觉的电流,FMEIS 可以通过捕获肌肉收缩产生的电场波纹来瞄准多块深层肌肉。FMEIS 具有超薄外形(~220 微米)、与人体皮肤紧密匹配的低弹性模量(212.8 千帕)以及精心设计的粘性传感器表面,可以很好地贴合人体皮肤,最大限度地减少运动伪影。FMEIS 使用机器学习模型在手势识别和肌肉力量预测方面都实现了很高的准确性。FMEIS 在多个 HMI 应用程序(包括人机协作、外骨骼控制和虚拟手术)中展示了性能,显示出未来实时协作 HMI 系统的巨大潜力。
https://www.science.org/doi/full/10.1126/sciadv.adv3359
生物材料
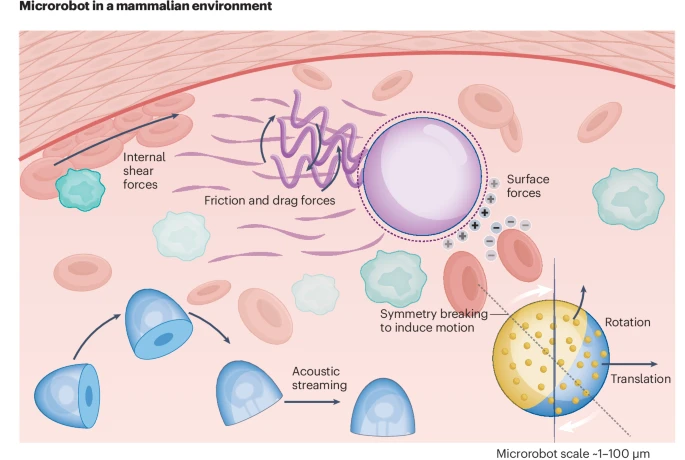
医疗微型机器人利用智能材料有效、精确和局部地针对特定的身体部位,从而有望在未来彻底改变精准医学。材料科学和微纳加工或纳米制造技术的进步促进了微型机器人中无数功能的实现。在活体哺乳动物组织的高动态且通常无法接近的环境中,微型机器人的高效导航和监测对于其有效的体内应用和最终的临床转化至关重要。这种需求要求部署具有足够灵敏度、穿透深度和时空分辨率的生物医学成像模式,以及将生物相容性造影剂有效地集成到微型机器人中。该综述讨论了在复杂生物环境中对微型机器人进行多路复用成像和驱动的新兴方法,重点是响应和对比材料的协同组合,以实现所需的形态和功能特性、体内可见性和生物安全性。微型机器人和生物医学成像之间的融合为新一代医用微型机器人铺平了道路,使能量能够用于机械驱动和有效监测其体内活动。
https://www.nature.com/articles/s41578-025-00811-4
END
内容 | 张艳青 郝娅婷
编辑 | 余帆
审核 | 刘帅 罗虎
扫码添加医工学人负责人微信,进入综合及细分领域群聊(国内外医工交叉领域顶尖高校、科研院所、医院、企业等专家学者、硕博士、工程师、企业家等),参与线上线下交流活动

推荐阅读
点击关注医工学人
本篇文章来源于微信公众号: 医工学人
